
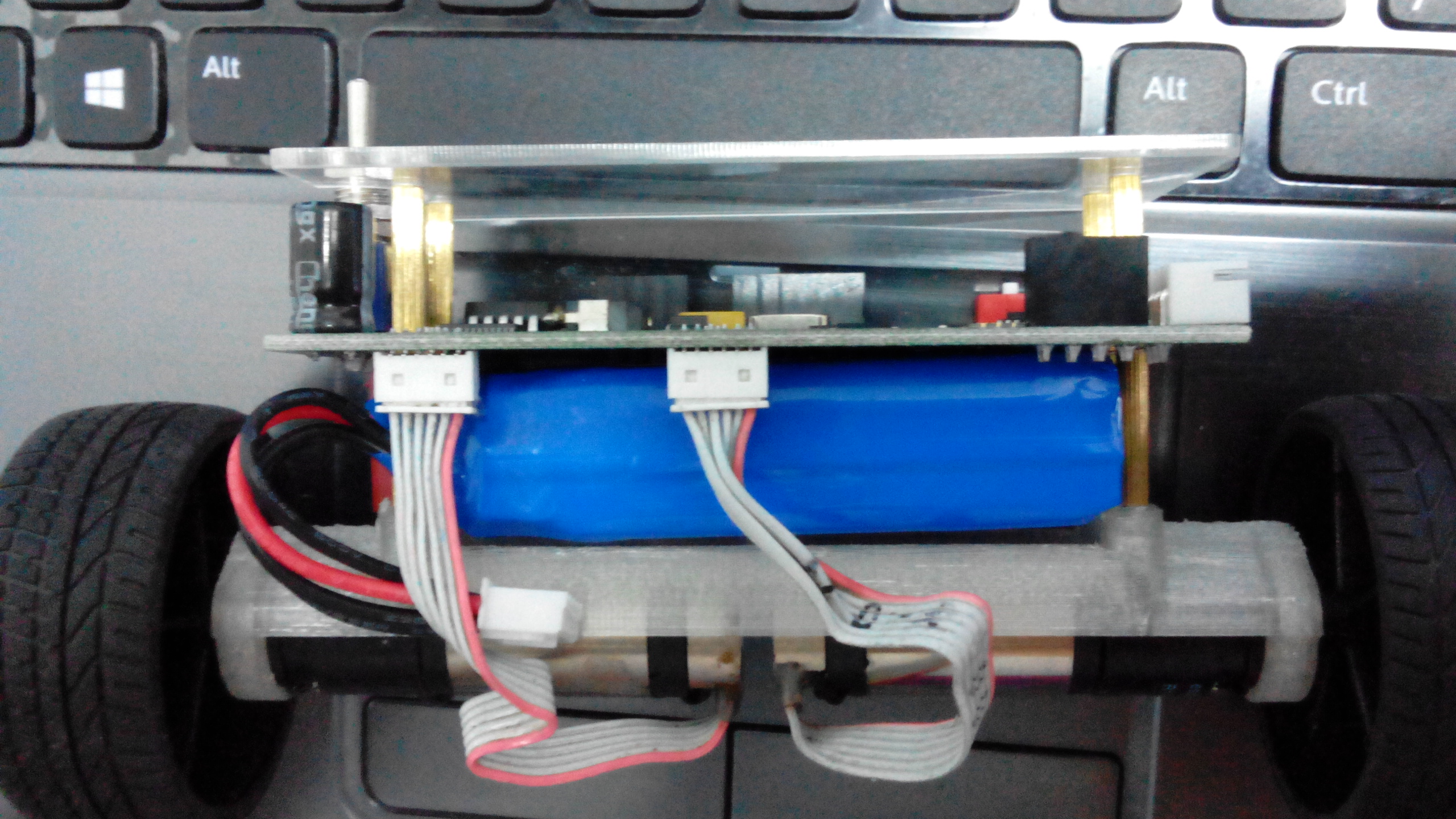
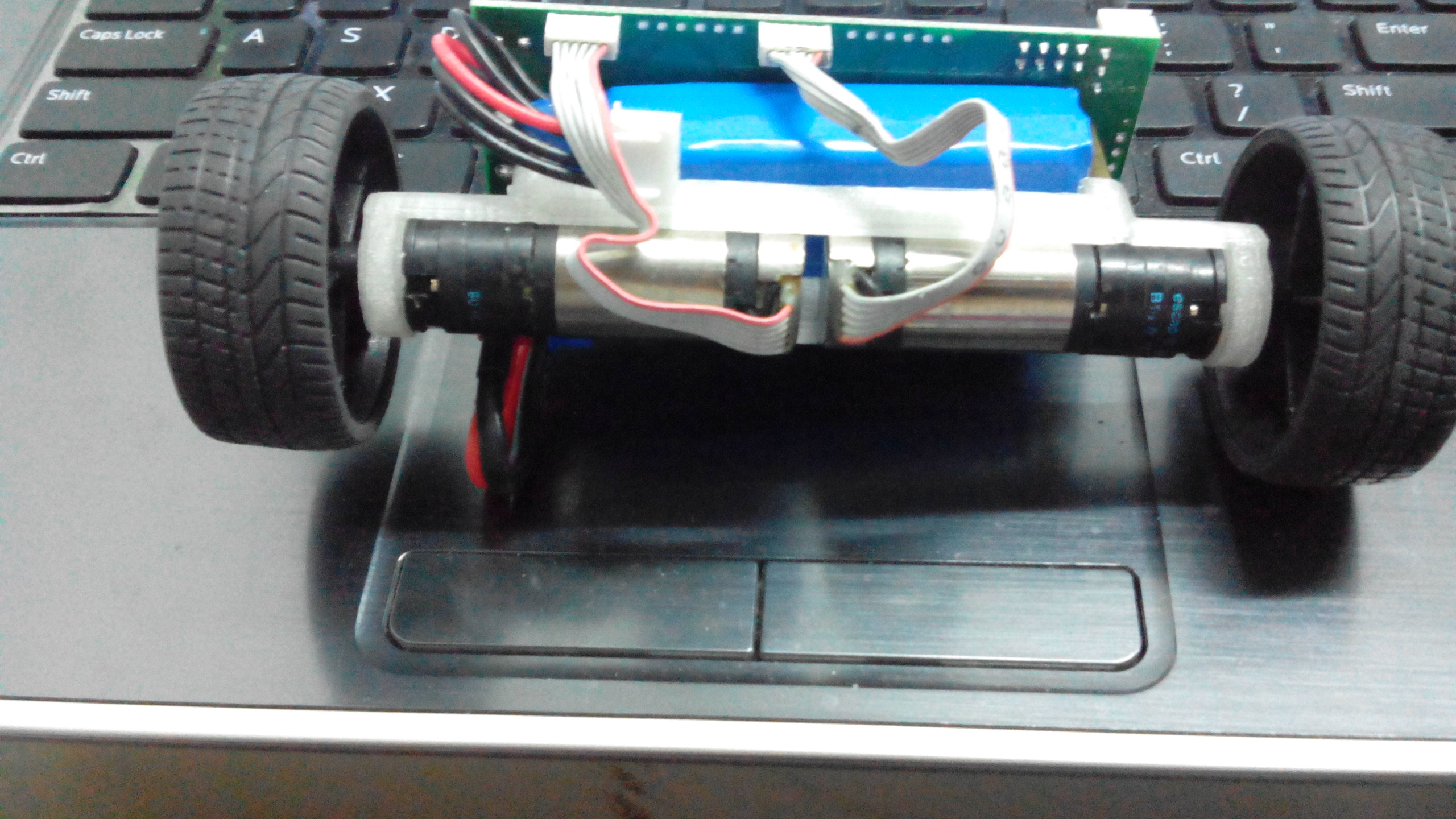
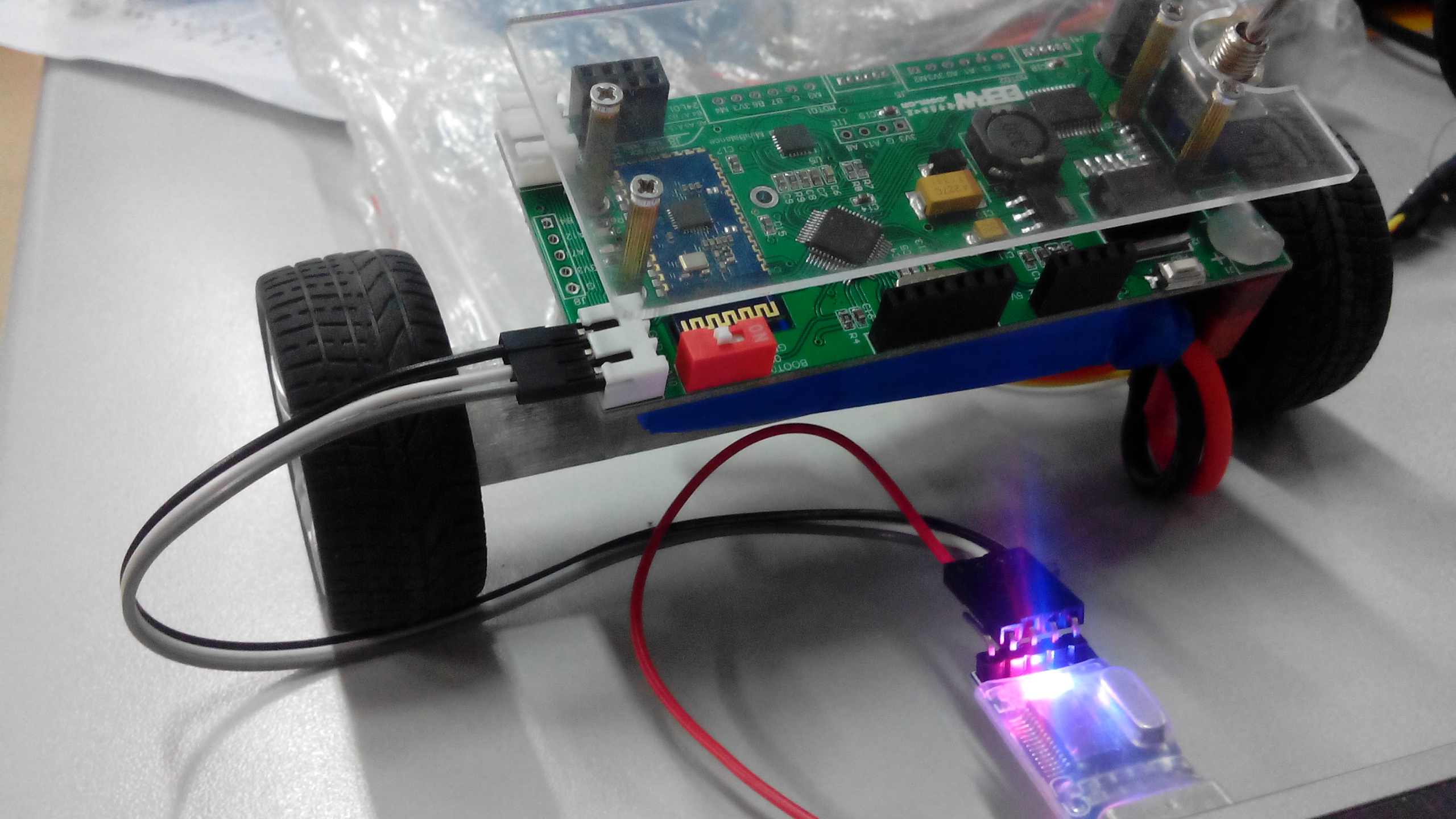
废话少说直接上图

以下是几张侧面照

今天主要做了2件事:
1、编码器计数值实验
在中断处理函数中添加如下代码:
printf("%d,%d\r\n",Encoder_Left,Encoder_Right); //编码器值采集实验
即发送编码器的值。下载程序后,打开serialchart.exe,推一下小车,小车开始震荡,小车震荡过程中的左右编码器返回波形图如下所示:
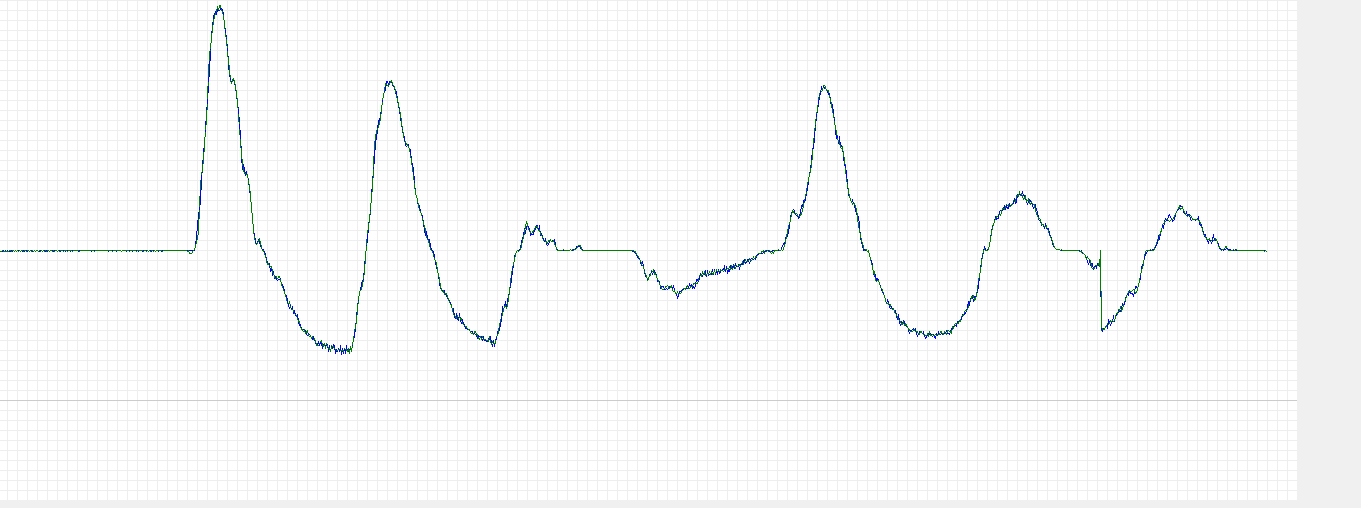
由图知,直立情况下左右轮转速近似相等(编码器值相等),同时没有外界扰动时会趋近于0。
2、系统时间的获得
为了使得小车可以在系统运行后的固定时间内做动作,需要记录系统运行的时间,在这里做了一个获得系统开机时间的函数,最小单位是5ms。
(1)首先在main.c中定义 _5microsecond=0,second=0,minute=0,hour=0这4个无符号整形变量,然后在main.h中用extern声明。
(2)函数定义在show.c中,实现过程如下:
void systime_Get(void)
{
_5microsecond++;
if( (_5microsecond) == 200 )
{
_5microsecond = 0;
second++;
}
if( (second) == 60 )
{
second = 0;
minute++;
}
if( (minute) == 60 )
{
minute = 0;
hour++;
}
}
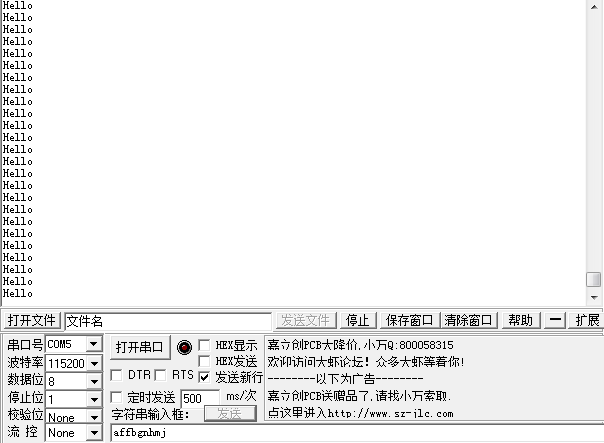
通过串口调试助手查看返回的数据可以比较方便地检测该函数的正确性。
| 有奖活动 | |
|---|---|
| 硬核工程师专属补给计划——填盲盒 | |
| “我踩过的那些坑”主题活动——第002期 | |
| 【EEPW电子工程师创研计划】技术变现通道已开启~ | |
| 发原创文章 【每月瓜分千元赏金 凭实力攒钱买好礼~】 | |
| 【EEPW在线】E起听工程师的声音! | |
| 高校联络员开始招募啦!有惊喜!! | |
| 【工程师专属福利】每天30秒,积分轻松拿!EEPW宠粉打卡计划启动! | |
| 送您一块开发板,2025年“我要开发板活动”又开始了! | |
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 在FireBeetle2ESP32-C5上实现温湿度检测和显示被打赏¥20元 | |
| 在FireBeetle2ESP32-C5上实现光照强度检测及显示被打赏¥21元 | |
| 以FireBeetle2ESP32-C5实现数据识读播报被打赏¥19元 | |
| 【STM32F103ZET6】14:实测STM32F1的串口输出任务的挂起与恢复功能被打赏¥27元 | |
| Chaos-nano在压力容器监控系统中的项目应用被打赏¥23元 | |
| 基于FireBeetle2ESP32-C5的WS2812B彩色灯带控制被打赏¥21元 | |
| SWM221CBT7显示开发板驱动TFT显示屏被打赏¥19元 | |
| SWM221CBT7显示开发板驱动OLED屏显示被打赏¥19元 | |
| SWM221CBT7显示开发板及其使用被打赏¥20元 | |
| 揭秘Chaos-nano:ArduinoProMini轻量级操作系统开发框架深度解析与实战应用被打赏¥19元 | |
 ),按菜单键,连接蓝牙,即可实现对前后的控制(我目前只做到这一步哈哈)。和电脑连接也是同理,之后可以直接用电脑的串口调试助手给小车发送指令~
),按菜单键,连接蓝牙,即可实现对前后的控制(我目前只做到这一步哈哈)。和电脑连接也是同理,之后可以直接用电脑的串口调试助手给小车发送指令~
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

