
一、实验器材
1、TPYboard V102板 一块
2、无线蓝牙串口透传模块HC-06 一个
3、OLED 屏 一块
二、无线蓝牙串口透传模块
1、无线蓝牙串口透传模块,又叫蓝牙模块,是一种集成蓝牙功能的短距离无线通讯模块。按照协议标准,分为1.2、2.0、2.1、4.0和4.1。4.0以上又称为BLE。蓝牙模块按照用途可分为数据蓝牙模块和语音蓝牙模块。数据蓝牙模块主要用于无线数据传输,语音蓝牙模块则主要完成语音及立体声音频的无线数据传输。蓝牙模块的接口分为串口、usb口、数字IO口,模拟IO口、SPI编程接口及语音接口。本实验中使用的蓝牙模块为串口无线数据模块。
2、常用的蓝牙模块:HC05蓝牙模块和HC06蓝牙模块属于HC民用级串口蓝牙模块,HC03和HC04属于HC工业级串口蓝牙模块。目前大部分蓝牙产品都使用民用级。其中HC05是主从一体,既可以搜索蓝牙也可以被搜索,HC06是从机模块,只能是被搜索。这个实验中,我们使用从机模块就足够,因为采用HC06。

(1)可用于各种带蓝牙功能的电脑、蓝牙主机、手机、PDA以及智能家居等
(2)宽波特率范围4800-1382400,并且模块兼容单片机系统。
(3)可以很容易的利用手机蓝牙软件进行调试。
三、蓝牙模块HC06的使用
这里我们用一个例子来简单说明蓝牙模块HC06如何使用。
例子:手机蓝牙调试工具向HC06发送R时,点亮tpyboard上的LED3,当发送Y时,关闭LED3.
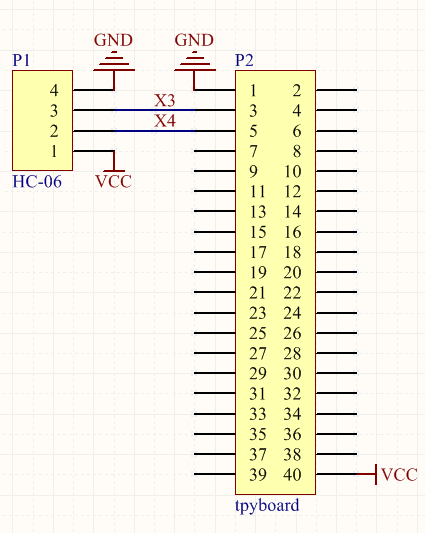
1、连线方法
手机蓝牙调试工具有很多,这里我们选用蓝牙串口助手。图标如图

这个软件可以进行数据的收发,这个功能可以实现数据的监控,如图数据监控的截图

还可以进行模拟按键的数据收发(这个功能可以方便我们做个蓝牙遥控小车这一类的DIY),这个功能可以设置一下,详细的步骤如下:
1、点击模式切换,切换至监控站模式;2、点击页面中的右下角的三个点(功能扩展键)选择更多
3、选择地面站设置,界面如图

在这里设置好了之后点击确定就可以保存设置。
3、用手机控制LED3的亮灭
程序代码:
import pyb
from pyb import UART
from pyb import Pin
ULY=UART(2,9600)#(TX, RX) = (X3, X4)
while True:
if(ULY.any()>0):
scs=ULY.readall()
print(scs)
四、舵机
1、舵机
每个玩过机器人的应该都听说过这个小东西,或者听到过它转起来时发出的“吱吱吱”声音。他与普通电机不同,他可以在指令下旋转0到180度之间的任意角度。比如我们在控制机器人的胳膊转动时,就可以用舵机来控制其抬起或者是放下的角度。
2、舵机的控制与选择
舵机一般都是采用三线控制,即GND、POWER和control(PWM)。
舵机在选择时,有很多种,一般选择时采用以下指标:
大小:舵机身材不同,从大到小,一直到微型有很多种,选择适合你项目的舵机。
重量:根据项目要求选择合适重量的舵机。
扭力:就是舵机有多大的力。在5V的电压下,标准舵机的扭力是5.5千克/厘米(75盎司/英寸)。
转速:从一个位置旋转到另一个位置所需的时长。在5V的电压下,舵机标准转度是0.2秒移动60度。
3、支架
选择好舵机,还要选择合适的支架,保障舵机能够在平台上运转。

五、手机蓝牙控制舵机旋转
使用蓝牙串口助手软件发送想让舵机转动的角度,然后舵机相应命令,转动相应的角度。
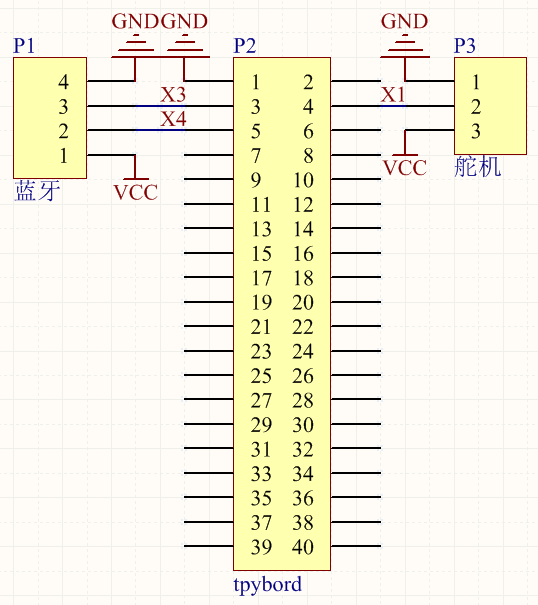
1、连线方法
2、代码
import pyb
from pyb import UART
from pyb import Pin
from pyb import Servo
ULY=UART(2,9600)#(TX, RX) = (X3, X4)
i=1
ds=0
s=Servo(1)
scs=0
while i>0:
ds=int(scs)-90
s.angle(ds,300)
pyb.delay(1500)
if(ULY.any()>0):
scs=ULY.readall()
3、演示效果
http://v.youku.com/v_show/id_XMjUzNDUwNjkwOA==.html
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

