
蜂鸣器这里我直接连接PA6引脚,移植了安富莱的驱动程序,不再过多叙述,只是IO输出,跟LED灯同理按键,板子上的按键如下

两个按键分别在PA14和PA18,区别在S1带下拉,S2不带下拉,根据原理图,S1按下前PA18是低电平,按下后是高电平,S2没有上下拉电阻,按常规应该是要配置为上拉模式,所以按下前是高电平,按下后是低电平
按照原理图配置
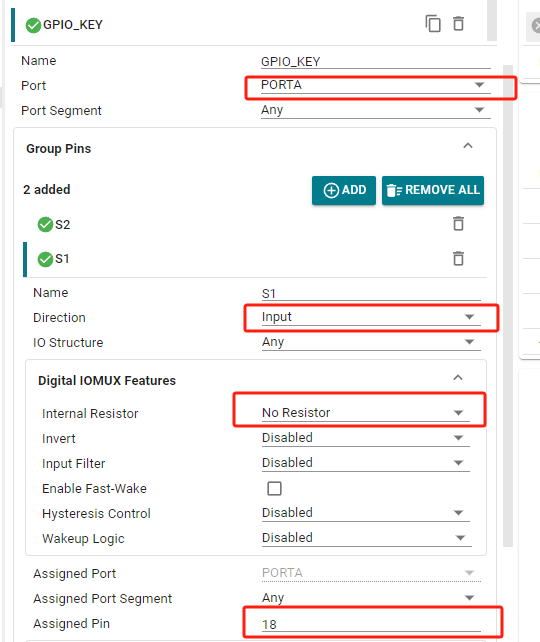
PA18配置为输入不配置上下拉

PA14配置为上拉输入
#define GET_KEY() DL_GPIO_readPins(GPIO_KEY_PORT, GPIO_KEY_S1_PIN|GPIO_KEY_S2_PIN)
key_in = GET_KEY();
if (key_in == 0X00044000) // S1
{
key = 0x10;
}
else if (key_in == 0X00000000) // S2
{
key = 0x20;
}
else if (key_in == 0X00040000) // S1&S2
{
key = 0x30;
}直接就可以读出按键状态
DS18B20,单总线的一个温度传感器,需要控制IO的输入输出,网上很容易找驱动,需要us级别的延迟
连接到PA1

#define DS18B20_DQ_OUTH DL_GPIO_setPins(GPIO_DQ_PORT, GPIO_DQ_PIN_4_PIN)
#define DS18B20_DQ_OUTL DL_GPIO_clearPins(GPIO_DQ_PORT, GPIO_DQ_PIN_4_PIN)
#define DS18B20_DQ_READ DL_GPIO_readPins(GPIO_DQ_PORT, GPIO_DQ_PIN_4_PIN)
#define DS18B20_DQ_IN DL_GPIO_initDigitalInput(GPIO_DQ_PIN_4_IOMUX);DL_GPIO_disableOutput(GPIO_DQ_PORT, GPIO_DQ_PIN_4_PIN)
#define DS18B20_DQ_OUT DL_GPIO_initDigitalOutput(GPIO_DQ_PIN_4_IOMUX);DL_GPIO_enableOutput(GPIO_DQ_PORT, GPIO_DQ_PIN_4_PIN)
// 复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_DQ_OUT;
DS18B20_DQ_OUTL; // 拉低DQ
delay_cycles(750 * 32); // 拉低750us
DS18B20_DQ_OUTH; // DQ=1
delay_cycles(15 * 32); // 15US
}
// 等待DS18B20的回应
// 返回1:未检测到DS18B20的存在
// 返回0:存在
uint8_t DS18B20_Check(void)
{
uint8_t retry = 0;
DS18B20_DQ_IN;
while (DS18B20_DQ_READ && retry < 200)
{
retry++;
delay_cycles(1 * 32);
};
if (retry >= 200)
return 1;
else
retry = 0;
while (!DS18B20_DQ_READ && retry < 240)
{
retry++;
delay_cycles(1 * 32);
};
if (retry >= 240)
return 1;
return 0;
}
// 从DS18B20读取一个位
// 返回值:1/0
uint8_t DS18B20_Read_Bit(void) // read one bit
{
DS18B20_DQ_OUT;
uint8_t data;
DS18B20_DQ_OUTL;
delay_cycles(2 * 32);
DS18B20_DQ_OUTH;
delay_cycles(12 * 32);
DS18B20_DQ_IN;
if (DS18B20_DQ_READ)
data = 1;
else
data = 0;
delay_cycles(50 * 32);
return data;
}
// 从DS18B20读取一个字节
// 返回值:读到的数据
uint8_t DS18B20_Read_Byte(void) // read one byte
{
uint8_t i, j, dat;
dat = 0;
for (i = 1; i <= 8; i++)
{
j = DS18B20_Read_Bit();
dat = (j << 7) | (dat >> 1);
}
return dat;
}
// 写一个字节到DS18B20
// dat:要写入的字节
void DS18B20_Write_Byte(uint8_t dat)
{
uint8_t j;
uint8_t testb;
DS18B20_DQ_OUT;
for (j = 1; j <= 8; j++)
{
testb = dat & 0x01;
dat = dat >> 1;
if (testb)
{
DS18B20_DQ_OUTL; // Write 1
delay_cycles(2 * 32);
DS18B20_DQ_OUTH;
delay_cycles(60 * 32);
}
else
{
DS18B20_DQ_OUTL; // Write 0
delay_cycles(60 * 32);
DS18B20_DQ_OUTH;
delay_cycles(2 * 32);
}
}
}
// 开始温度转换
void DS18B20_Start(void) // ds1820 start convert
{
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc); // skip rom
DS18B20_Write_Byte(0x44); // convert
}
// 初始化DS18B20的IO口 DQ 同时检测DS的存在
// 返回1:不存在
// 返回0:存在
uint8_t DS18B20_Init(void)
{
DS18B20_Rst();
return DS18B20_Check();
}
// 从ds18b20得到温度值
// 精度:0.1C
// 返回值:温度值 (-550~1250)
int16_t DS18B20_Get_Temp(void)
{
uint8_t temp;
uint8_t TL, TH;
int16_t tem;
DS18B20_Start(); // ds1820 start convert
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc); // skip rom
DS18B20_Write_Byte(0xbe); // convert
TL = DS18B20_Read_Byte(); // LSB
TH = DS18B20_Read_Byte(); // MSB
if (TH > 7)
{
TH = ~TH;
TL = ~TL;
temp = 0; // 温度为负
}
else
temp = 1; // 温度为正
tem = TH; // 获得高八位
tem <<= 8;
tem += TL; // 获得底八位
tem = (float)tem * 0.625; // 转换
if (temp)
return tem; // 返回温度值
else
return -tem;
}所需基本驱动
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

