
在工业自动化与物联网领域,CAN、Modbus和LoRa是三种主流通信技术。而亿佰特在该行业具有丰富的产品供客户选择与使用,帮助客户进一步确定需求,本文将结合技术细节与实际案例解析其核心区别。
一、协议本质与应用定位
Modbus作为应用层协议,Modbus诞生于1979年Modicon公司的PLC控制系统,采用主从式架构(Client-Server模式)。其核心优势在于简单易实现,通过功能码(如03读保持寄存器、06写单个寄存器)实现设备间数据交互,支持RS-485/RS-232串口及Modbus-TCP以太网形态。CAN由Bosch在1983年为汽车电子开发,属于数据链路层协议。CAN采用多主式架构(对等通信),通过11/29位标识符实现非破坏性仲裁机制。其硬件级错误检测(CRC校验+错误帧)和优先级仲裁能力,使其成为实时性要求高的场景首选,如汽车CAN总线控制发动机、变速箱等关键节点。LoRaLoRa(Long Range)是一种基于扩频技术的低功耗广域网(LPWAN)物理层协议,2015年由Semtech公司推出。其核心优势是超远距离传输(城市3-5km,郊区15km+),采用星型网络拓扑,支持电池供电设备数年续航。典型应用于智能电表、环境监测等低功耗广域物联网场景。
二、核心差异对比
1. 物理层特性
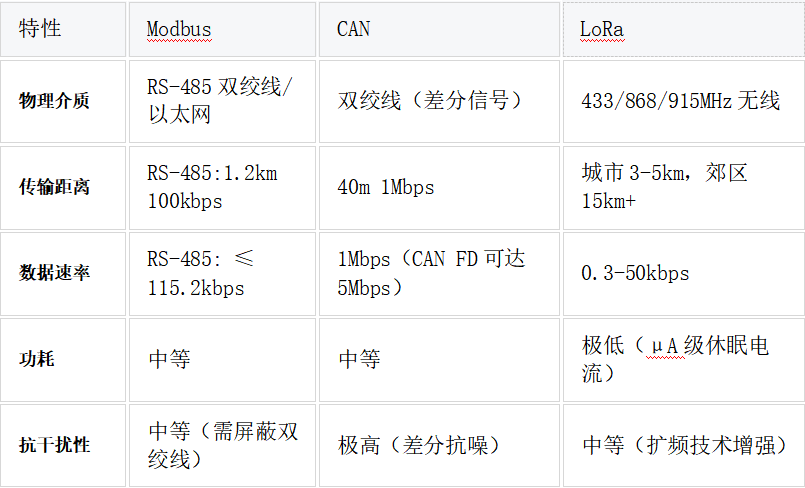
2. 协议架构与拓扑
Modbus:主从式架构(1主+多从),支持RS-485总线或以太网星型拓扑。需轮询机制维持通信,实时性受限CAN:多主对等架构,通过ID优先级仲裁解决总线冲突。实时性达毫秒级,支持总线型拓扑。LoRa:星型拓扑(网关+终端),网关集中管理数百终端。依赖LoRaWAN网络层协议实现设备管理。
3. 典型数据帧结构
Modbus RTU:紧凑二进制帧(地址+功能码+数据+CRC),最大256字节。CAN 2.0A:短帧结构(11位ID+8字节数据),支持优先级仲裁。LoRaWAN:基于LoRa物理层封装MAC层帧,包含设备地址、端口号、加密载荷,典型载荷<50字节。
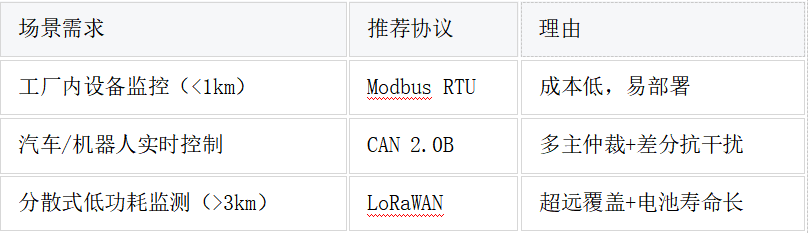
三、协议选择建议
结语
Modbus、CAN和LoRa分别代表了工业与物联网通信的不同维度:Modbus:解决设备互联问题。CAN:实现实时控制。LoRa:满足广域低功耗需求。
我司相关产品:
Modbus系列相关产品:MA01系列,MA01-V2系列、分布式IO系列,modbus数码管系列。CAN系列相关产品:ECAN-E01系列,ECAN-S01系列,ECAN-W01系列。LoRa系列相关产品:E870系列,EWD95M系列,E78-DTU系列。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

