
目录
一、小车的安装 ------------------------------002楼
二、小车的测试 ----------------------------------------005楼
成都到广州,等了两三天小车终于到手了,好兴奋,先开贴,一楼只做索引哈
目录
一、小车的安装 ------------------------------002楼
二、小车的测试 ----------------------------------------005楼
成都到广州,等了两三天小车终于到手了,好兴奋,先开贴,一楼只做索引哈
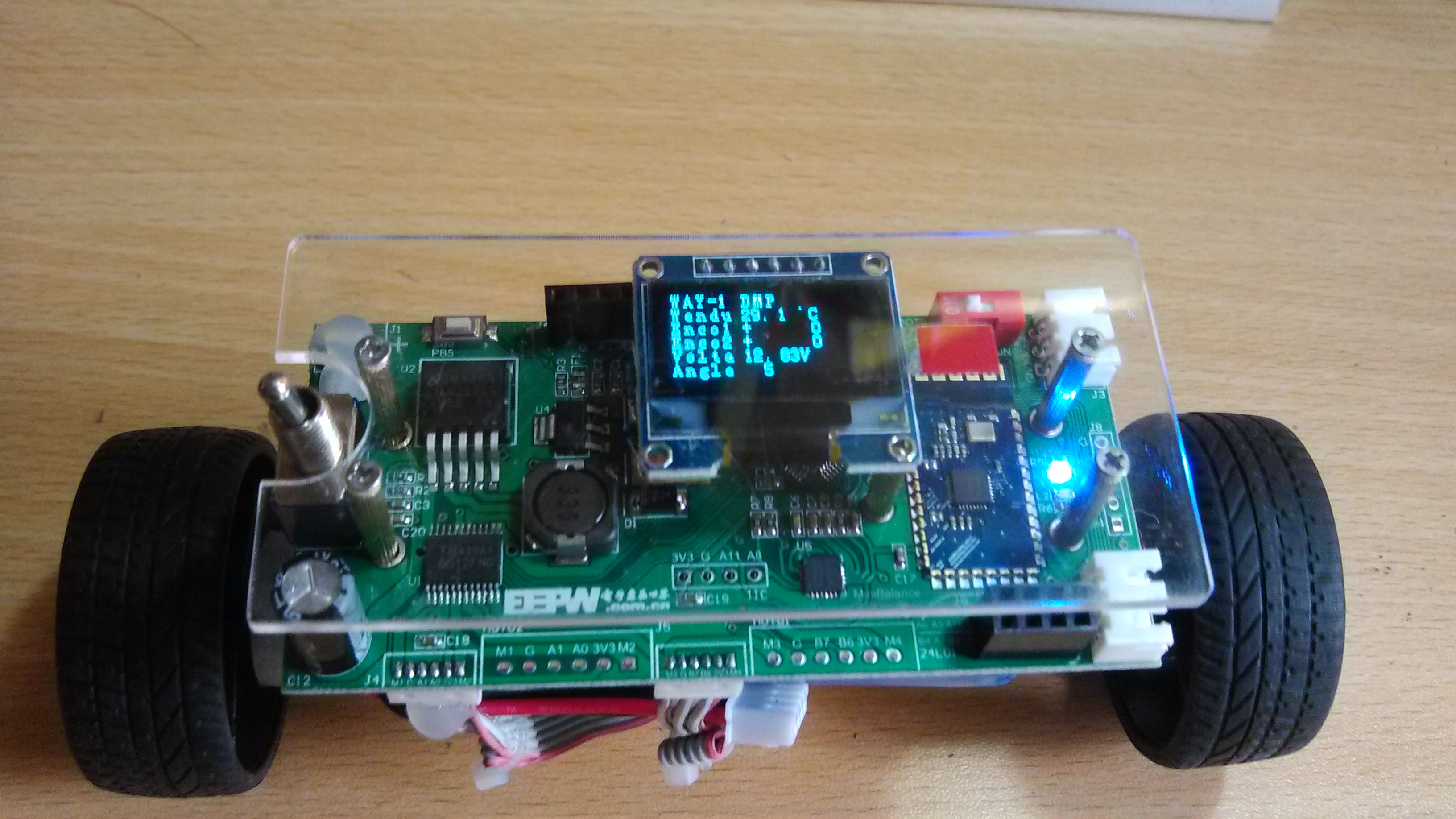
二、小车的测试
1.小车自平衡视频(原配程序)通过手机蓝牙连接遥控小车
(只有自己的手机,没法同时拍摄和遥控,晚点发)

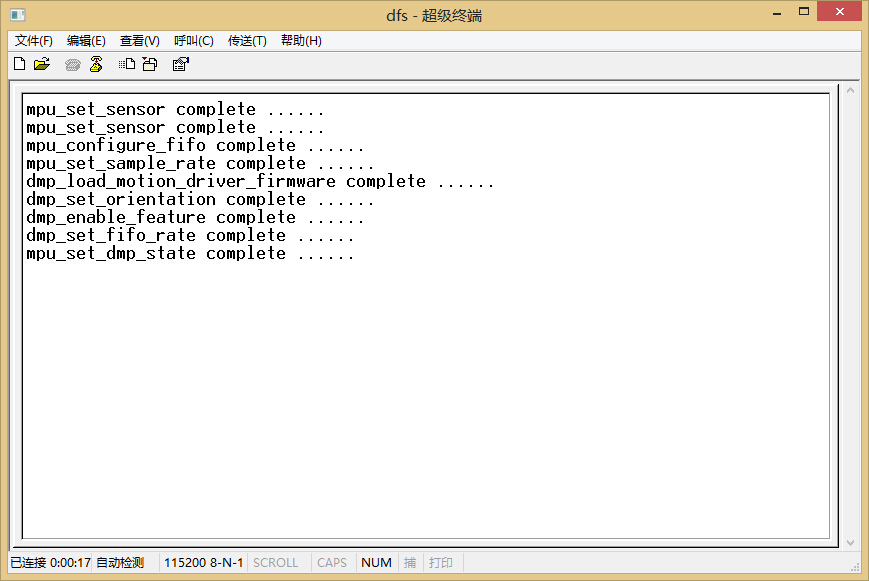
配置好超级终端后,重新上电
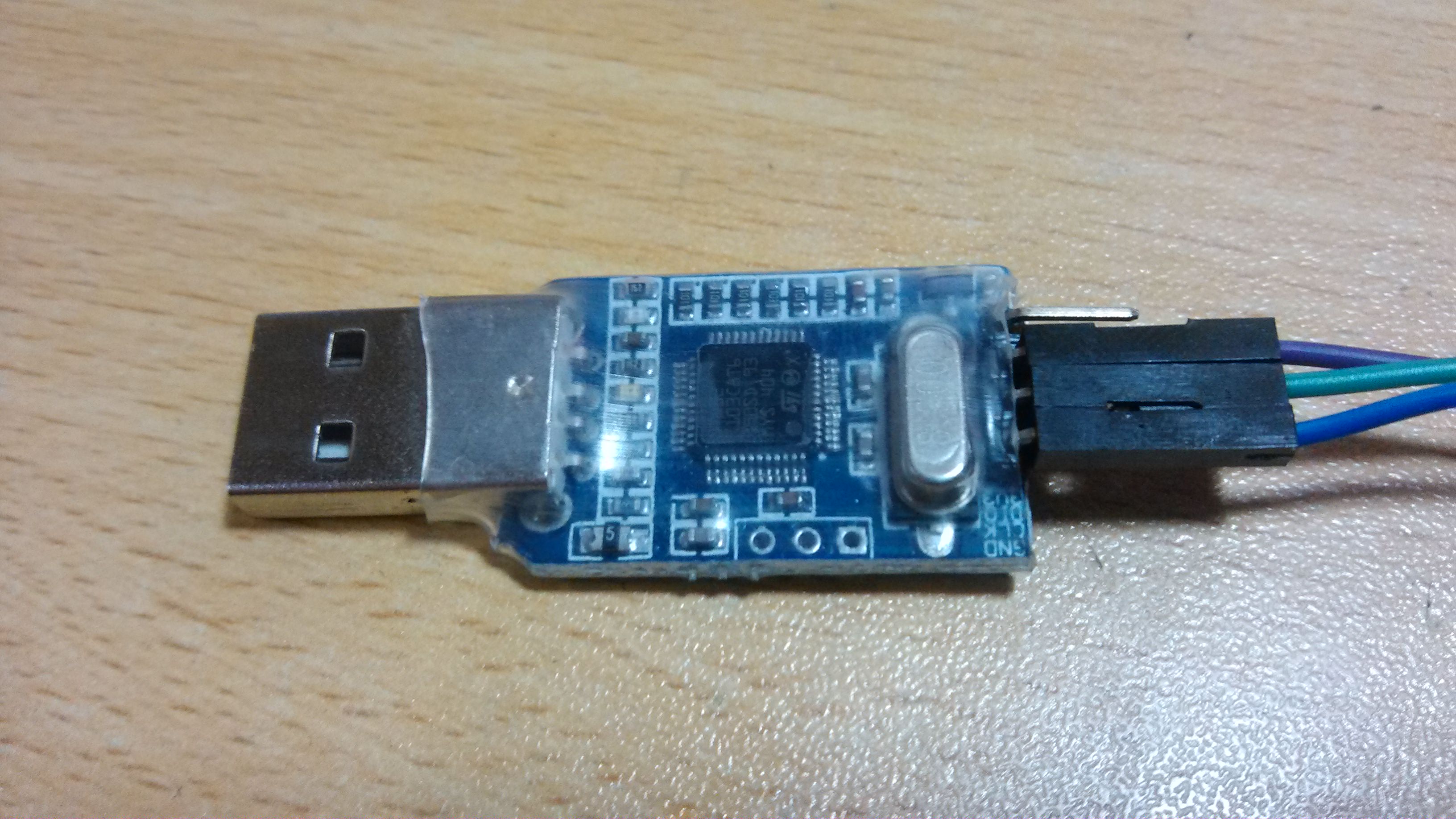
3.通过四线Jlink下载程序
用的是这种4线Jlink,由于电池供电,所以这里只接三根线

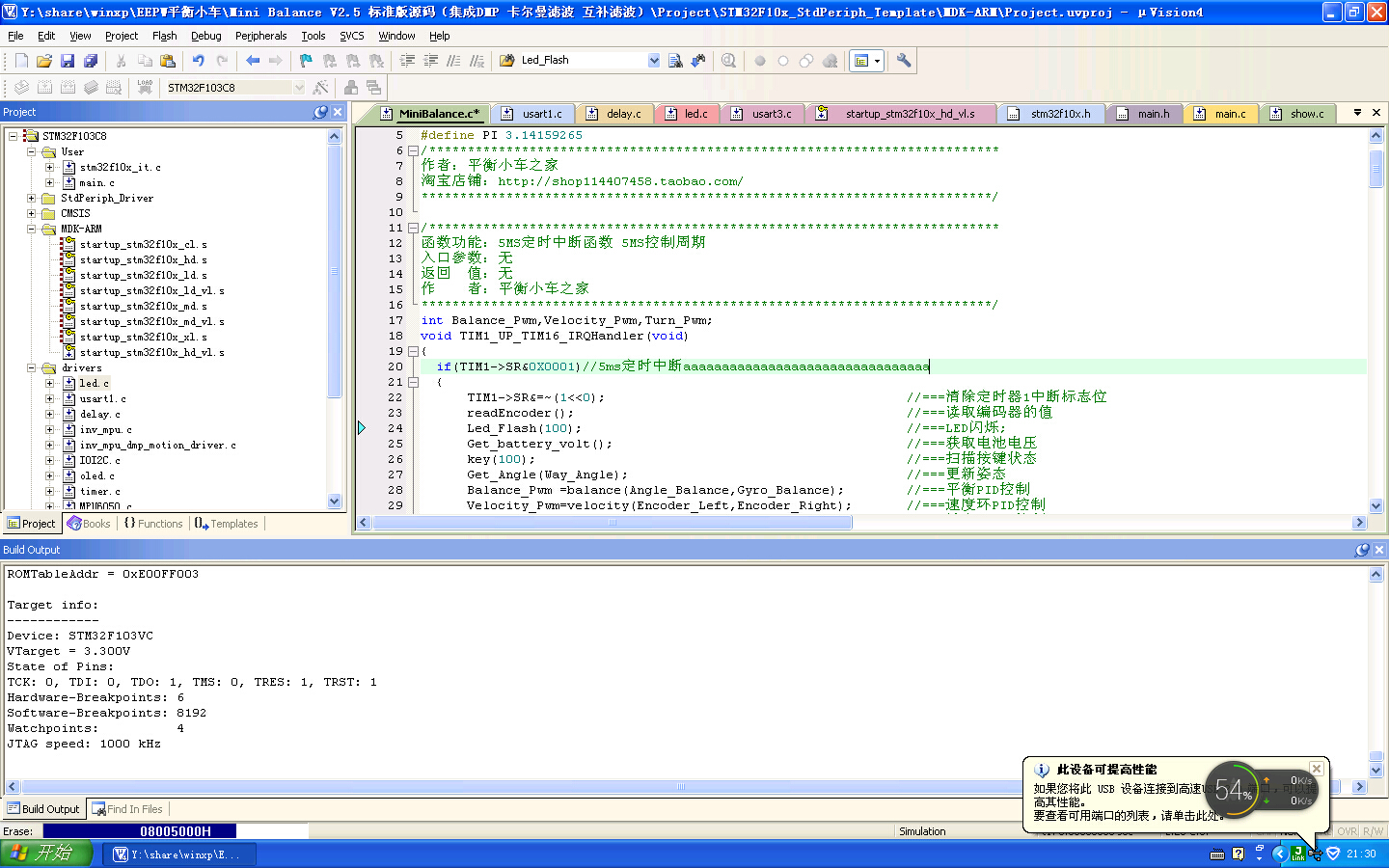
小车主板右上方的红色拨码开关拨到OFF,代表boot0接高电平
MDK配置成Jlink下载模式,程序编译后,直接按下载
4.通过蓝牙模块电脑控制
蓝牙模块通过PL2303接到电脑
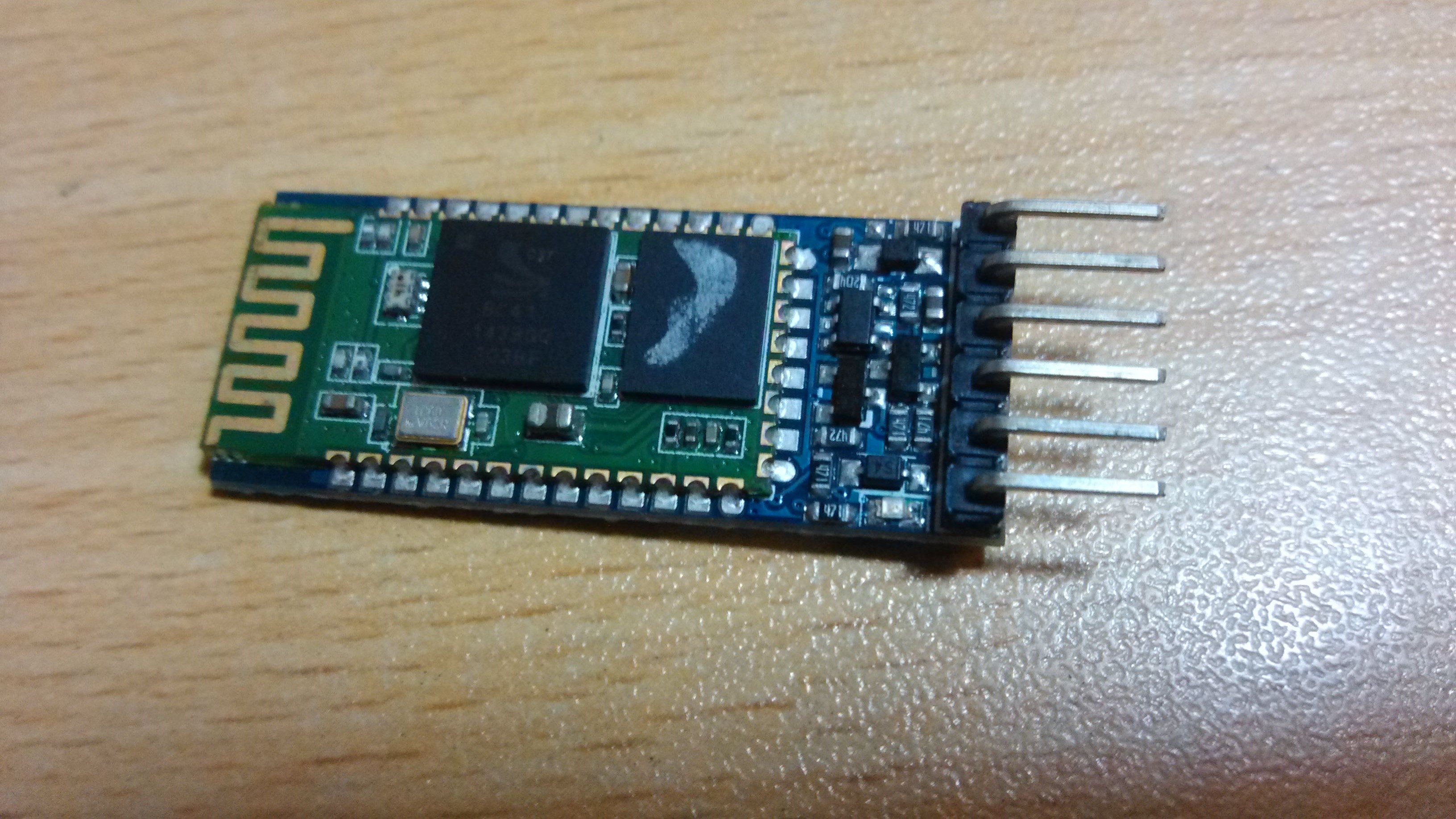
用电脑的一个蓝牙配置工具,也可以自己用串口调试工具发送AT命令,将蓝牙模块配置成主模式(小车蓝牙是从模式)密码配置成1234 ATSetTool.rar
这时候使用手机的MiniBalance软件,查询并连接后,分别操作上下左右,就会得到对应编码
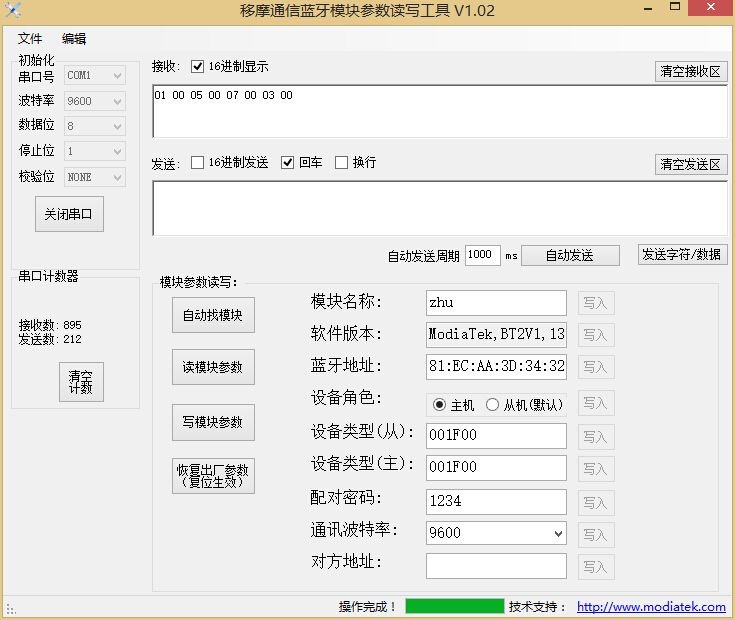
这个是开关机的左划右划的编码
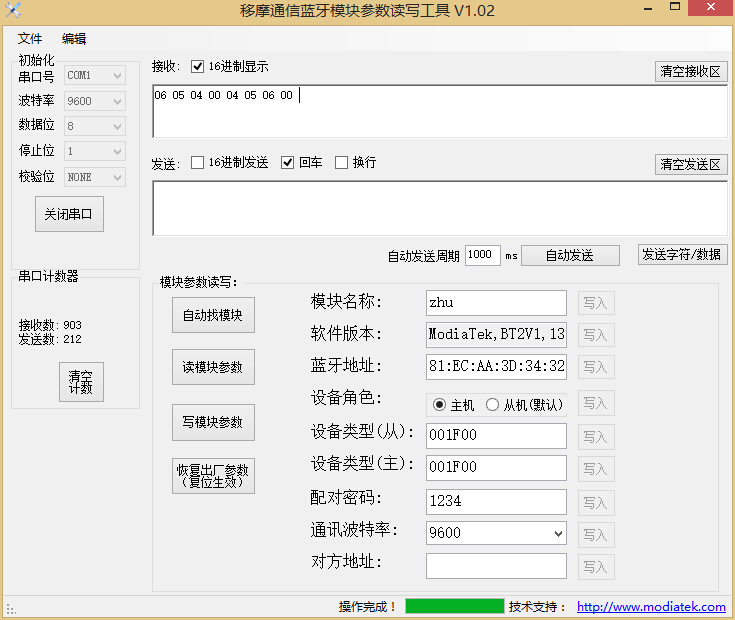
在程序的串口3的中断里函数中可以找到对应的代码
/************************************************************************** 函数功能:串口3接收中断 入口参数:无 返回 值:无 作 者:平衡小车之家 **************************************************************************/ void USART3_IRQHandler(void) { if(USART3->SR&(1<<5))//接收到数据 { static int uart_receive=0;//蓝牙接收相关变量 uart_receive=USART3->DR; if(uart_receive<10) mode_data[0]=uart_receive; if((mode_data[0]==six_data_2[0] &&mode_data[1]==six_data_2[1] &&mode_data[2]==six_data_2[2] &&mode_data[3]==six_data_2[3]) ||(mode_data[0]==six_data_1[0] &&mode_data[1]==six_data_1[1] &&mode_data[2]==six_data_1[2] &&mode_data[3]==six_data_1[3])) { Flag_Stop=!Flag_Stop; mode_data[0]=0; mode_data[1]=0; mode_data[2]=0; mode_data[3]=0; } if(uart_receive==0x00) Flag_Qian=0,Flag_Hou=0,Flag_Left=0,Flag_Right=0;//////////////刹车 if(uart_receive==0x01) Flag_Qian=1,Flag_Hou=0,Flag_Left=0,Flag_Right=0;//////////////前 if(uart_receive==0x05) Flag_Qian=0,Flag_Hou=1,Flag_Left=0,Flag_Right=0;//////////////后 else if(uart_receive==0x02||uart_receive==0x03||uart_receive==0x04) Flag_Qian=0,Flag_Hou=0,Flag_Left=0,Flag_Right=1; else if(uart_receive==0x06||uart_receive==0x07||uart_receive==0x08) Flag_Qian=0,Flag_Hou=0,Flag_Left=1,Flag_Right=0; mode_data[7]=mode_data[6]; mode_data[6]=mode_data[5]; mode_data[5]=mode_data[4]; mode_data[4]=mode_data[3]; mode_data[3]=mode_data[2]; mode_data[2]=mode_data[1]; mode_data[1]=mode_data[0]; } }
关掉手机MiniBalance软件,启动小车,蓝牙模块主从之间会自动连接,就可以通过在电脑发送指令码控制小车了
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |










 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

