
01引言
场景是智能网联汽车安全测试技术的基础,是开展安全测试评估的重要前提。为了确保智能网联汽车产品测试验证结果具备足够的覆盖度,需要构建基于场景的测试评估体系,对系统及其功能进行全面评估,从而系统、客观地反映车辆产品的安全状况。
2021年7月,工业和信息化部发布《关于加强智能网联汽车生产企业及产品准入管理的意见》,2023年11月,工业和信息化部、公安部、住房和城乡建设部、交通运输部四部委联合发布《关于开展智能网联汽车准入和上路通行试点工作的通知》,明确智能网联汽车产品应符合模拟仿真、封闭场地、实际道路等测试验证要求,并对测试场景的覆盖度提出了相关要求,以有效地验证自动驾驶系统安全。
2025年2月,工业和信息化部、市场监管总局联合发布了《关于进一步加强智能网联汽车产品准入、召回及软件在线升级管理的通知》,提出针对系统边界和安全响应、控制策略、人机交互等方面,通过模拟仿真、封闭场地、实际道路等测试方法开展充分测试,确保智能网联汽车产品满足安全要求。
随着智能网联汽车驾驶自动化功能的快速迭代,测试场景的覆盖度评估已成为保障系统安全验证的核心环节。对此,本文系统研究了基于智能网联汽车功能与设计运行条件(ODC)的测试场景覆盖度分析方法,并构建测试场景覆盖度量化评价体系,为实现高效、全面的驾驶自动化功能测试提供支持和实践参考。
02测试场景覆盖度分析框架
为保证搭载驾驶自动化系统的智能网联汽车产品的功能和性能得到充分测试验证,基于系统功能定义及ODC分析测试场景覆盖度,确认测试用例集合的全面性与有效性。针对驾驶自动化系统的安全要求,其测试场景覆盖度分析可基于以下分层维度展开:
动态驾驶任务执行
特性:与系统设计运行范围(以下简称ODD)强关联,例如道路、目标物、天气环境等。
分析路径:需独立构建测试场景库,通过ODD要素组合验证功能边界。
动态驾驶任务后援与人机交互
特性:以安全要求为导向,例如系统控制策略和提示信息。
分析路径:可合并为一类,基于预设安全标准设计测试用例并评估覆盖度。
2.1 动态驾驶任务执行能力
基于系统的动态驾驶任务执行能力验证,其测试场景覆盖度分析流程主要包括“ODD元素覆盖度分析”和“功能测试用例覆盖度分析”两条路径,分析流程如图1所示。
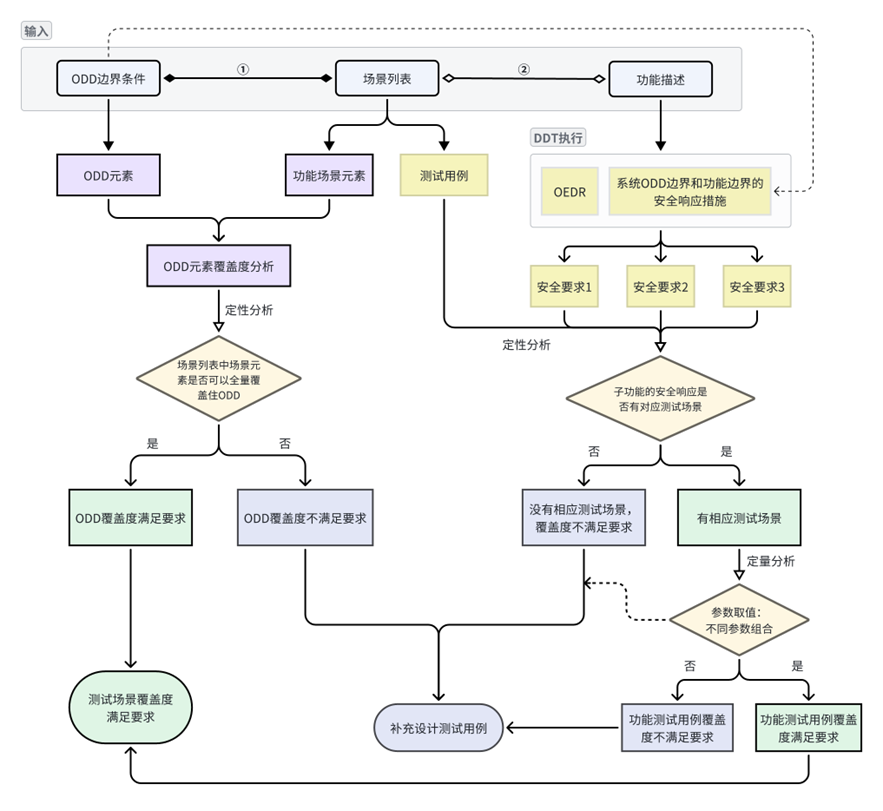
图1 DDT执行-测试场景覆盖度分析流程
(1)ODD元素覆盖度分析:ODD边界条件与场景列表映射(即图中①),针对ODD元素和功能场景元素匹配度,开展定性分析。若场景列表中场景元素可以全量覆盖ODD,则ODD元素覆盖度满足要求;若场景列表中场景元素无法全量覆盖ODD,则ODD元素覆盖度不满足要求。
(2)功能测试用例覆盖度分析:功能描述与场景列表映射(即图中②),针对系统的目标和事件探测与响应能力,结合系统ODD边界和功能边界的安全响应措施,面向系统安全要求与测试用例的匹配度,开展定性分析。
○若具备相应测试用例,则进入下一步定量分析,判断参数组合是否满足“关键参数充分泛化”的原则。如是,则功能测试用例覆盖度满足要求;如不是,则功能测试用例覆盖度不满足要求。
○若不具备相应测试用例,则功能测试用例覆盖度不满足要求。
针对(1)和(2)中覆盖度不满足的情况,需要进一步补充设计测试用例。
2.2 动态驾驶任务后援和人机交互能力
基于系统的动态驾驶任务后援和人机交互能力验证,其测试场景覆盖度分析流程如图2所示。
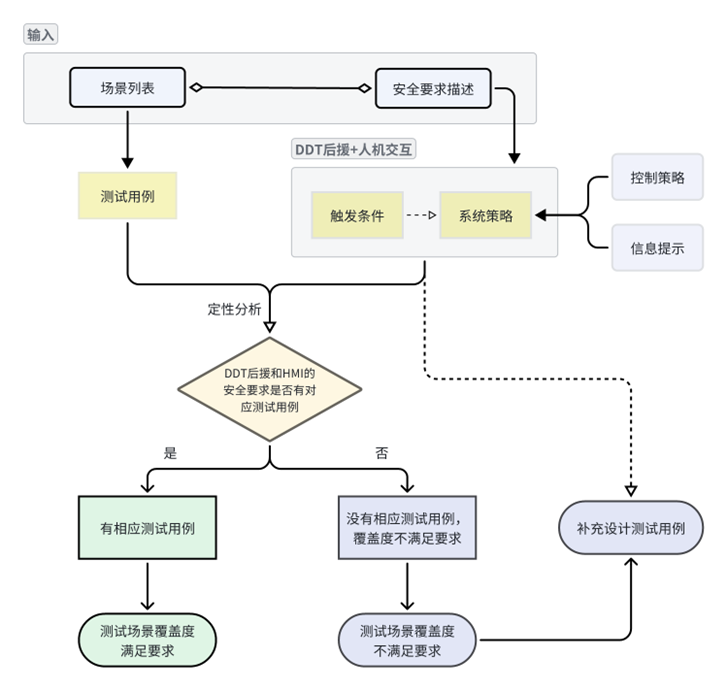
图2 DDT后援&HMI-测试场景覆盖度分析流程
(1)根据系统安全要求描述,分解得到功能触发条件与相应的系统策略,其中系统策略包括“系统执行的控制策略”和“对驾驶员的信息提示”两方面;
(2)将安全要求与场景列表进行映射,针对“触发条件和系统策略”与测试用例的匹配度,开展定性分析。
○若具备相应测试用例,则测试场景覆盖度满足要求;
○若不具备相应测试用例,则测试场景覆盖度不满足要求。
针对(2)中覆盖度不满足的情况,需要结合(1)的分析结果,进一步补充设计测试用例。
03测试场景要素参数组合
针对2.1动态驾驶任务执行能力中“功能测试用例覆盖度分析”阶段,本文提出一种场景要素参数组合方法,为测试用例的定性/定量分析和补充设计提供参考。场景要素参数组合分析思路如图3所示。
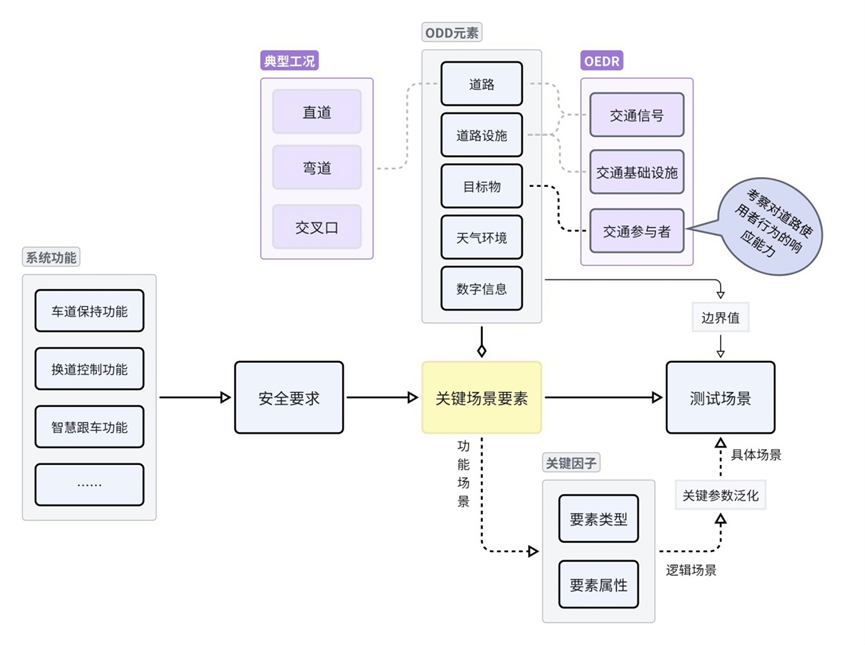
图3 测试场景要素参数组合分析流程
首先,基于系统不同功能的功能需求和安全要求,筛选与待测功能强相关的ODD元素作为关键场景要素,通过测试矩阵的形式,得到功能测试场景;其次,定义场景要素关键参数(关键因子),即对安全要求影响较大的参数,并确定场景要素类型和属性,在系统设计运行范围内取值并进行排列组合,泛化形成具体测试场景。
赛目科技Safety Pro工具可泛化千万个已知危险场景和未知危险场景,确保场景覆盖度能支撑安全验证需求
在测试场景设计过程中,为验证智能网联汽车产品在系统ODD和功能边界范围内的动态驾驶任务执行能力,以及探测和响应系统边界的能力,建议考虑以下几点开展测试用例设计:
(1)针对系统ODD边界和功能边界测试,场景的设计应考虑待测系统对外部环境条件变化或场景要素状态变化的响应能力,从而验证系统达到ODD边界或功能边界时的控制策略。
(2)针对目标物的识别测试,由于道路结构对于系统的决策及控制策略有关键影响,因此为全面验证系统对其他道路使用者行为的响应能力,应基于不同道路结构设计典型工况,结合交通参与者关键属性,即“ODD要素+目标物行为”的测试矩阵进行综合场景构建。对于目标物位置和行为的基础分类示例如表1所示。
(3)针对关键因子选取,若关键场景要素类型中包含目标物层级,则对应的要素属性还应考虑行为特征参数取值,明确各要素间的相关性影响。
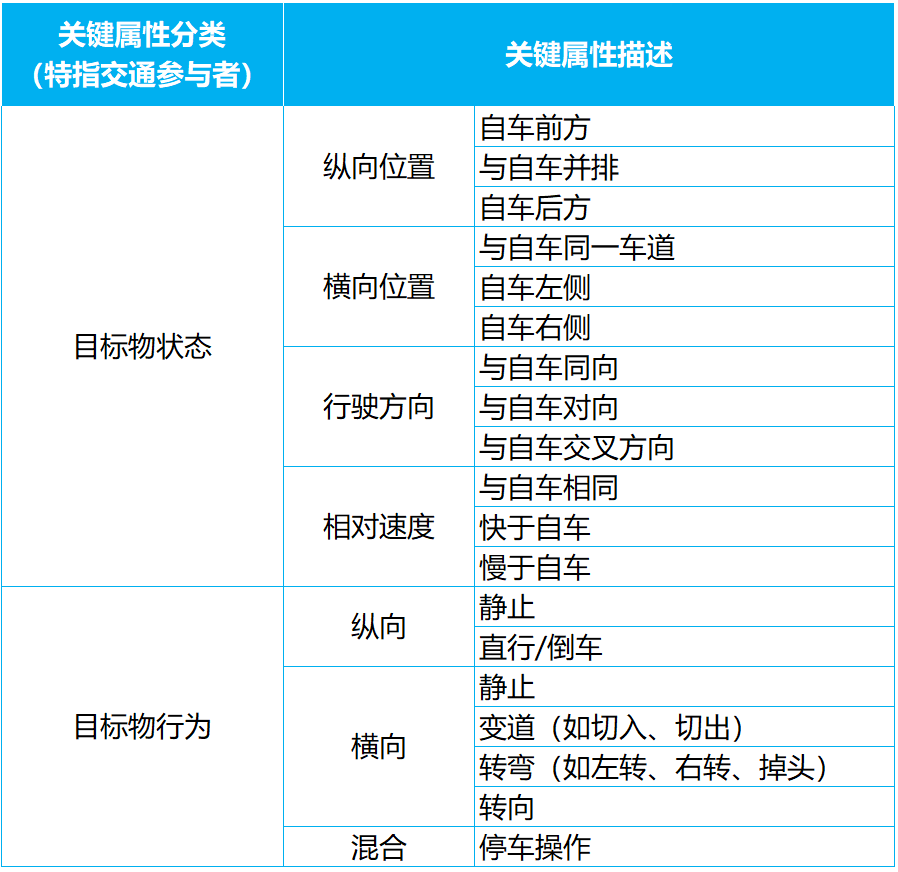
表1 目标物要素关键属性示例
基于上述方法论,以车道保持功能为例,按照“系统功能→关键场景要素→关键因子”的顺序展开分析。
根据车道保持功能定义与ODD,确定关键场景要素为道路几何、车道线或道路边缘类型、交通参与者的状态和行为,具体如表2所示。
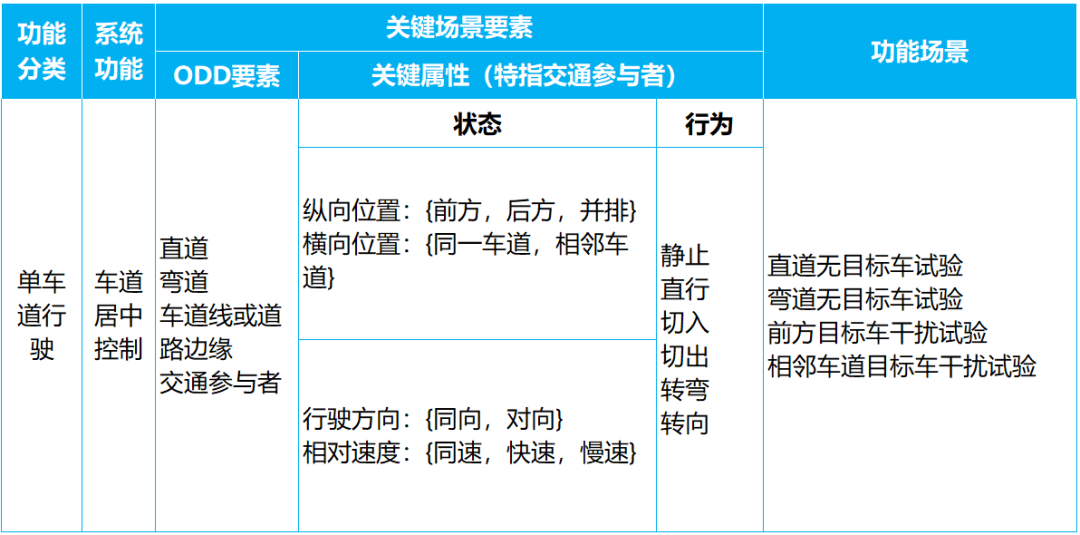
表2 功能关键场景要素映射表
将测试场景中对安全要求影响较大的参数定义为关键因子,并确定场景要素关键参数取值范围。
针对无目标车干扰类测试,主要基于道路要素设计场景,以弯道无目标车试验场景为例,选取弯道曲率半径、弯道长度、车道线类型、车道线丢失情况、车道线丢失长度等参数作为关键因子;
针对目标车辆干扰类测试,主要基于道路要素和交通参与者要素综合构建场景,以前方目标车辆干扰试验为例,选取目标车辆类型、目标车辆初始速度、目标车辆(转向)横向偏置距离、目标车辆转向/切出动作持续时间等参数作为关键因子,测试矩阵如表3所示。
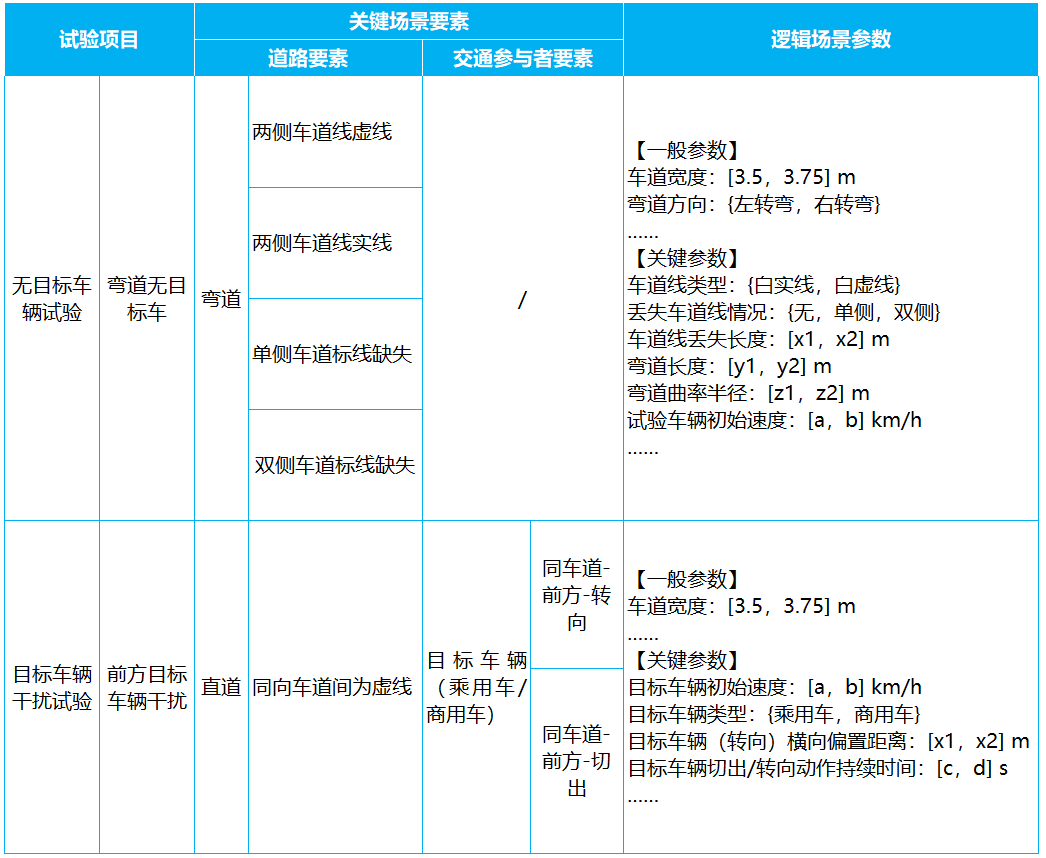
表3 逻辑场景要素参数组合示例
04测试场景覆盖度量化评价方法
在第二章测试场景覆盖度分析框架基础上,本小节提出一种“层次分析法+加权求和法”的覆盖度评价流程,如图4所示。内容主要包括:覆盖度指标分层、指标层权重分配、单一指标计算、综合覆盖度评估、场景覆盖度评级等步骤,将覆盖度从主观分析描述转化为可直观呈现的量化指标,为测试场景集的动态优化及合规性认证提供可量化的决策依据与实践参考。
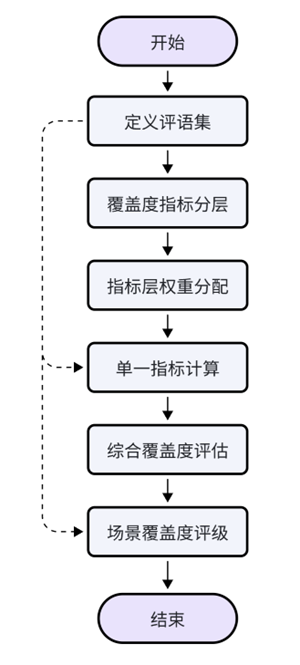
图4 场景覆盖度评价流程图
(1)定义评语集:建立覆盖度评语V={优,良,中,差} 共4个等级用于单一指标和综合结果评级。
(2)覆盖度指标分层:对测试场景覆盖度建立层次分析模型,建立指标集S={A,B , … ,n}。
(3)指标层权重分配:构建指标矩阵,确定权重集W={W₁,W₂ , … ,Wₙ}。
(4)单一指标计算:量化单一指标覆盖度,对于单一指标分别计算其覆盖程度。
(5)综合覆盖度评估:将单一指标的覆盖度按照权重分配合并,得到最终整体量化覆盖度指标。
4.1 覆盖度评价分级
评语集是对各个指标做出的评价结果所组成的集合,用于最后的评级。本文对覆盖度进行以下四个等级划分,如表4所示。

表4 覆盖度评价等级
4.2 确定指标权值
模糊层次分析法(Fuzzy analytic hierarchy process,FAHP)是在传统层次分析法(AHP)基础上,结合模糊集理论发展而来的一种多准则决策方法,它能够有效处理决策问题中的不确定性和模糊性,广泛应用于学术研究和实际决策中。由于测试场景覆盖度评估也是一个多指标、多因素的评价问题,因此可以借鉴FAHP的思想来评估各个指标的重要性,进行指标权重的分配与验证,具体流程如图5所示。
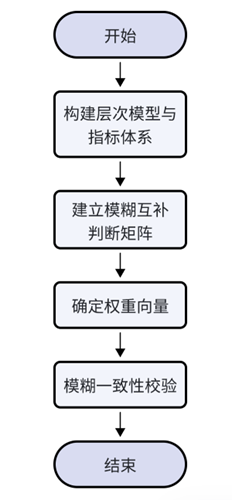
图5 FAHP分析流程图
1、层次模型与指标体系
将指标体系划分为S(目标层)和A/B(指标层)两层,建立指标集S={A,B},如图6所示。
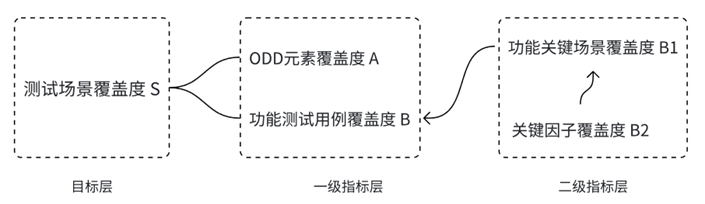
图6 场景覆盖度评价指标体系层次结构
2、模糊互补判断矩阵
模糊层次分析法中,对同一层级的评价指标两两比较判断时,采用一个因素比另一个因素的重要程度来定量表示。可依据表5中0.1~0.9标度法进行数据标度,得到模糊互补判断矩阵
(i,j=1,2,…,n),其中rᵢⱼ为对角线上的元素,均为0.5,表示因素i与其自身相比同等重要,且rᵢⱼ + rⱼᵢ=1。
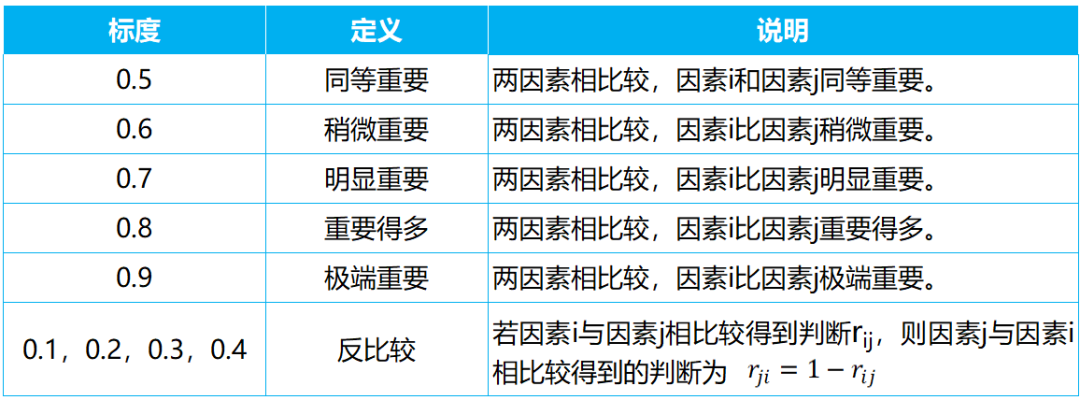
表5 0.1~0.9标度法
针对测试场景覆盖度评价指标层,根据以下权重分配原则,综合考量构建模糊互补矩阵,如公式(1)所示。
○安全关键性:哪个指标下覆盖的场景对安全更关键,则权重更高;
○分析成本:哪个指标分析过程中考虑的因素更多,则权重更高;
○专家经验:基于领域知识判断哪个指标更能代表“真实覆盖”,则权重更高。
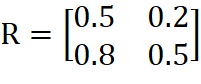
公式(1)
3、权重向量
基于公式(1)的模糊互补判断矩阵,可计算得到指标层的权重向量,确定权重集W={W₁,W₂ }。A的权重为W₁,B的权重为W₂,且W₁+W₂=1。权重公式如(2)所示。
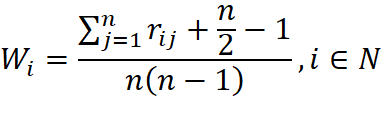
公式(2)
式中,W ᵢ 为因素 ᵢ 的权重。
由公式(2)可计算得到指标层的权重集W={0.35,0.65 },即W₁=0.35,W₂=0.65。
4、一致性检验
为判断根据公式(2)求得的权重值是否合理,利用模糊判断矩阵的相容性指标进行一致性检验,其表达式如公式(3)所示。若相容性指标值小于特定阈值α(一般取α=0.1),则可认为判断矩阵为满意一致矩阵。α越小,表明决策者对模糊判断矩阵的一致性要求越高。
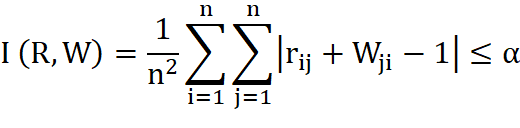
公式(3)
公式(4)
公式(5)
式中:
Ι(R,W) ——判断矩阵R与其特征矩阵W的相容性;
Wᵢⱼ ——特征矩阵元素;
W ——判断矩阵R的特征矩阵。
根据公式(4)~(5)可构建模糊互补判断矩阵R的特征矩阵
由公式(3)可进一步计算得到判断矩阵与特征矩阵的相容度为 Ι(R,W) =0.075<0.1,因此可认为将权重集W={0.35,0.65 }作为指标层A和B的权重分配是合理的。
4.3覆盖度评级
基于4.2中提出的场景覆盖度评价指标体系,本小节针对指标A“ODD元素覆盖度”和指标B“功能测试用例覆盖度”,采用百分制评分法对单一路径进行独立量化评估。
4.3.1 ODD元素覆盖度评级
参考GB/T 45312-2025《智能网联汽车 自动驾驶系统设计运行条件》中关于ODD元素的分级规范,依据产品设计运行条件的描述,对测试场景集中各场景元素进行映射与匹配分析,并基于公式(6)和(7)分别计算各元素层级下的覆盖度及整体ODD元素总覆盖度。在此基础上,可进一步结合表1对计算结果实施二次分级评定,从而更直观地反映ODD元素的覆盖水平。
公式(6)
公式(7)
ODD元素覆盖度评价矩阵如表6所示。
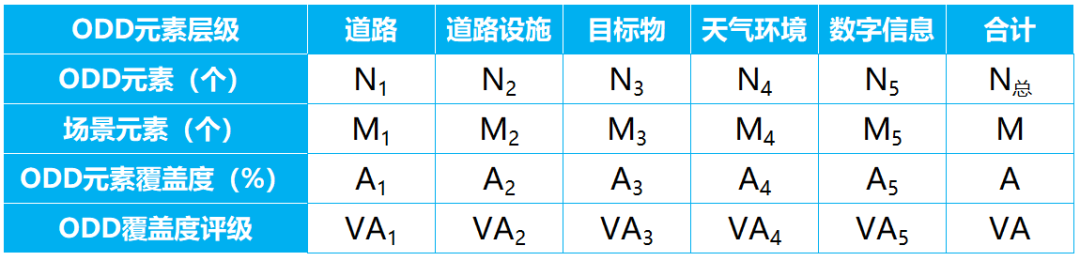
表6 ODD元素覆盖度评价
4.3.2 功能测试用例覆盖度评级
首先,面向系统功能和安全要求,筛选与待测功能强相关的ODD元素作为关键场景要素,通过测试矩阵的形式,得到功能测试场景(参考集合),对测试用例(输入集合)的匹配度开展定性分析,本阶段可定义为“功能关键场景覆盖度”。
功能关键场景覆盖度评价矩阵如表7所示。
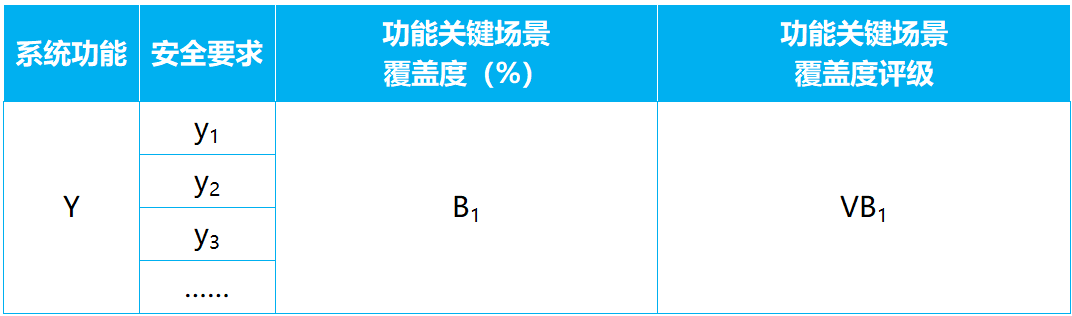
表7 功能关键场景覆盖度评价
其次,基于上一步筛选的关键场景要素及其属性,定义场景要素关键参数(关键因子),即对安全要求影响较大的参数,结合系统设计运行范围对功能关键测试场景中关键参数覆盖程度开展定量分析,本阶段可定义为“关键因子覆盖度”。
关键因子覆盖度评价矩阵如表8所示。
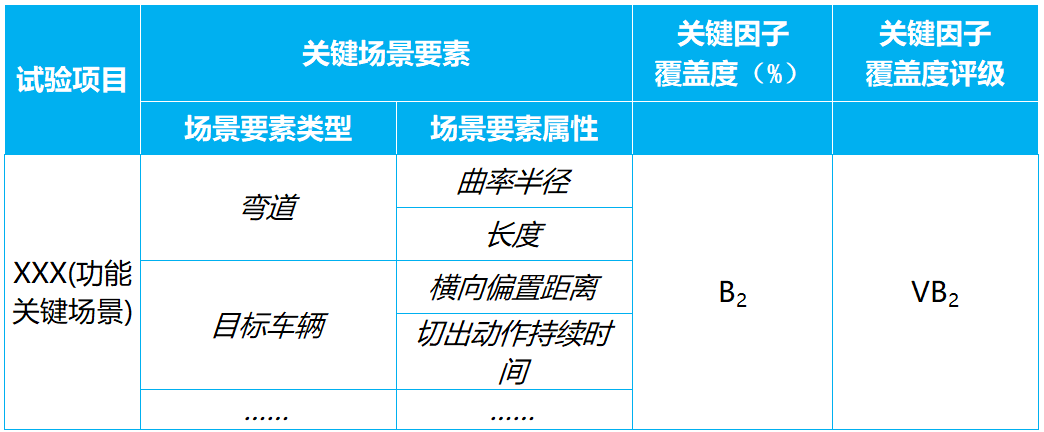
表8 关键因子覆盖度评价
4.3.3 综合覆盖度评级
为量化不同指标对整体场景覆盖的贡献度,需采用加权求和模型进行综合评估。该方法的核心思想是:通过单一指标评分结果,再结合指标权重进行加权求和,得到综合评分,从而实现对多路径协同覆盖效果的客观量化。测试场景综合覆盖度计算方法如公式(8)所示。
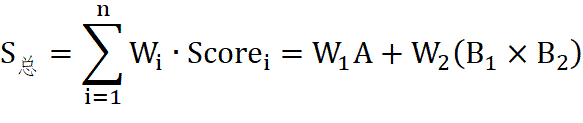
公式(8)
式中:
S总——测试场景综合覆盖度;
Wᵢ ——因素 i 的权重,且∑Wᵢ=1;
A ——ODD元素覆盖度;
B₁ ——功能关键场景覆盖度;
B₂ ——关键因子覆盖度。
05结语
本篇文章系统性构建了智能网联汽车测试场景覆盖度解析框架,通过“动态驾驶任务执行”“动态驾驶任务后援与人机交互”双层分析架构,明确了覆盖度评估的核心路径。针对功能验证环节,提出基于功能逻辑树的三级映射模型——分解系统功能需求、提取关键场景要素、构建参数组合矩阵,并以车道保持功能为实证对象完成场景参数空间建模。此外,针对覆盖度分析框架进一步采用线性加权合成模型将多维覆盖度指标整合为统一的综合覆盖度指数,实现了对测试场景集的量化评价。该体系还支持权重动态调整机制及评估路径扩展,能够灵活适应测试策略迭代需求。
本文研究成果为智能网联汽车测试场景库建设与优化提供了理论支撑与方法论框架,对推动驾驶自动化系统安全验证的规范化发展具有重要实践意义。未来,赛目科技还将面向不同等级驾驶自动化系统功能的技术标准和规范,持续横向扩展测试场景集范围,形成支撑型式认证与技术准入的测试基准。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

