
【天籁齐舞】
在大家的支持下,我的队伍正式建立起来了,现确定该组成员共有4名成员组成,分别为:
andery88 qqjiaqq001 zhangpeng759 tuyukui2
进度表:
|
时间 |
进展内容 |
链接 |
|
2012年11月22日 |
收到SAKURA开发板 |
|
|
2012年11月27日 |
学习Arduino的SPI函数(遇问题,求解答) |
|
| 2012年11月29日 | SAKURA开发板MCU及外设配置说明 | 【22楼】 |
| 2012年11月29日 | GR-SAKURA开发板程序局域网远程下载设想 | 【23楼】 |
| 2012年11月29日 |
TEthernet库的库函数解析 |
【24楼】 |
| 2012年11月30日 |
SPI通信测试成功 |
【26楼】 |
| 2012年11月30日 |
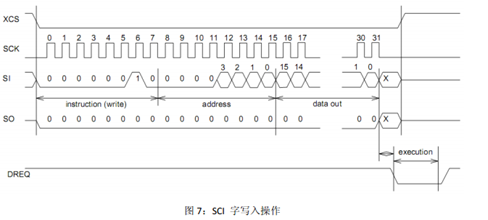
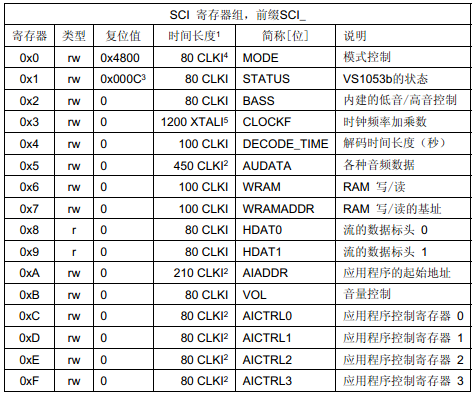
关于对语言模块VS1053B内部寄存器的配置 |
【29楼】 |
| 2012年12月01日 | 关于SAKURA开发板上SPI的CS管脚配置 | 【31楼】 |
| 2012年12月02日 | SAKRUA开发板对VS1053B的各种命令函数 | 【32楼】 |
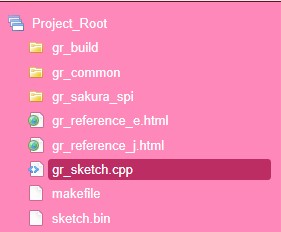
| 2012年12月04日 | 语言平台的硬件架构的搭建 | 【37楼】 |
| 2012年12月07日 | SPI读操作最高速测试--1.5MHz | 【42楼】 |
| 2012年12月10日 | VS1053B的SPI驱动程序(附有源代码) | 【43楼】 |
| 2012年12月13日 | Ardiuno开发板上的mini-SD卡读写 | 【46楼】 |
| 2012年12月19日 | MP3音乐文件的解析 | 【49楼】 |
| 2012年12月25日 | MP3音乐文件的实测解析 | 【52楼】 |
| 2013年01月05日 | USBHost的库函数解析 | 【53楼】 |
| 2013年01月06日 | USBHost对USB从设备的插入识别、删除和拔出 | 【54楼】 |
| 2013年01月07日 | USBHost对USB从设备供应商ID和产品ID等信息的读取 | 【56楼】 |
昨天,收到jackwang的电话,告知给我邮寄了Sakura开发板,今天上午就收到了板子,现秀一下:
Sakura开发板的正面图:





 ,我这才刚刚收到板子!
,我这才刚刚收到板子! 
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

