
前段时间忙了一阵,最近工作不太忙,继续试验。今天调通了MPU6050的程序,但还是不太满意。原来一直想用硬件I2C来实现的,但是一直没成功,今天就退而求其次,用了软件模拟,幸好还算成功。有图有真相:
工程下载地址放到百度网盘了,分享一下:
http://pan.baidu.com/s/1EklYI
不知道是不是违规,违规就请斑竹删了吧。
应该编译之后就能用了吧,Keil 5.10的开发环境,st-link下载器,有兴趣的可以试试。
前段时间忙了一阵,最近工作不太忙,继续试验。今天调通了MPU6050的程序,但还是不太满意。原来一直想用硬件I2C来实现的,但是一直没成功,今天就退而求其次,用了软件模拟,幸好还算成功。有图有真相:
工程下载地址放到百度网盘了,分享一下:
http://pan.baidu.com/s/1EklYI
不知道是不是违规,违规就请斑竹删了吧。
应该编译之后就能用了吧,Keil 5.10的开发环境,st-link下载器,有兴趣的可以试试。
传感器数据融合
MPU6050有了驱动之后就可以考虑数据融合了。简单来说,陀螺仪精度高,但时间长了会有漂移,加速度动态精度差,但没有长期漂移。综合利用陀螺仪和加速度计的特点,优势互补获得准确的姿态角度,方法就是用卡尔曼滤波做数据融合。
Snake0301使用的是MPU6050内置的DMP,直接输出姿态数据,使用方法网上有例程,可见这里:
https://gist.github.com/jannson/11280208
但是很多人说用DMP后Z轴会有漂移,Snake0301也有反映,且DMP的输出速率不是很高,最快200Hz,所以准备舍弃这种方法,还是中规中矩的用滤波吧。
今天看了"让四轴飞"网友的工程,发现程序还真是简洁,基本上一个模块一个.c文件即可实现,总共才那么六七个模块,重新移植修改起来就很方便了。反观crazyfliie的工程,代码量多了好几倍,又加入了操作系统FreeRTOS,真担心MCU的处理能力,不过看他们的视频,还是很有信心的。
附链接地址:
http://v.youku.com/v_show/id_XNTEwODM4MzEy/v.swf.html
上面分析了Crazyflie的acc采样数值的滤波,接着分析其他函数吧。上代码
void imu6Read(Axis3f* gyroOut, Axis3f* accOut)
{
mpu6050GetMotion6(&accelMpu.x, &accelMpu.y, &accelMpu.z, &gyroMpu.x, &gyroMpu.y, &gyroMpu.z);
imuAddBiasValue(&gyroBias, &gyroMpu);
if (!accelBias.isBiasValueFound)
imuAddBiasValue(&accelBias, &accelMpu);
if (!gyroBias.isBiasValueFound)
imuFindBiasValue(&gyroBias);
#ifdef IMU_TAKE_ACCEL_BIAS
if (gyroBias.isBiasValueFound &&
!accelBias.isBiasValueFound)
{
Axis3i32 mean;
imuCalculateBiasMean(&accelBias, &mean);
accelBias.bias.x = mean.x;
accelBias.bias.y = mean.y;
accelBias.bias.z = mean.z - IMU_1G_RAW;
accelBias.isBiasValueFound = TRUE;
// uartPrintf("Accel bias: %i, %i, %i\n",
// accelBias.bias.x, accelBias.bias.y, accelBias.bias.z);
}
#endif
imuAccIIRLPFilter(&accelMpu, &accelLPF, &accelStoredFilterValues,
(int32_t)imuAccLpfAttFactor);
imuAccAlignToGravity(&accelLPF, &accelLPFAligned);
// Re-map outputs
gyroOut->x = (gyroMpu.x - gyroBias.bias.x) * IMU_DEG_PER_LSB_CFG;
gyroOut->y = (gyroMpu.y - gyroBias.bias.y) * IMU_DEG_PER_LSB_CFG;
gyroOut->z = (gyroMpu.z - gyroBias.bias.z) * IMU_DEG_PER_LSB_CFG;
accOut->x = (accelLPFAligned.x - accelBias.bias.x) * IMU_G_PER_LSB_CFG;
accOut->y = (accelLPFAligned.y - accelBias.bias.y) * IMU_G_PER_LSB_CFG;
accOut->z = (accelLPFAligned.z - accelBias.bias.z) * IMU_G_PER_LSB_CFG;
// uartSendData(sizeof(Axis3f), (uint8_t*)gyroOut);
// uartSendData(sizeof(Axis3f), (uint8_t*)accOut);
}
typedef struct
{
int16_t x;
int16_t y;
int16_t z;
} Axis3i16;
typedef struct
{
int32_t x;
int32_t y;
int32_t z;
} Axis3i32;
typedef struct
{
float x;
float y;
float z;
} Axis3f;
typedef struct
{
Axis3i16 bias;
bool isBiasValueFound;
bool isBufferFilled;
Axis3i16* bufHead;
Axis3i16 buffer[IMU_NBR_OF_BIAS_SAMPLES];
} BiasObj;
BiasObj gyroBias;
BiasObj accelBias;
int32_t varianceSampleTime;
Axis3i16 gyroMpu;
Axis3i16 accelMpu;
Axis3i16 accelLPF;
Axis3i16 accelLPFAligned;
Axis3i16 mag;
Axis3i32 accelStoredFilterValues;
uint8_t imuAccLpfAttFactor;
mpu6050GetMotion6(&accelMpu.x, &accelMpu.y, &accelMpu.z, &gyroMpu.x, &gyroMpu.y, &gyroMpu.z);
从MPU6050读取6个数值,不表。
2、imuAddBiasValue(&gyroBias, &gyroMpu);
函数原型:
/**
* Adds a new value to the variance buffer and if it is full
* replaces the oldest one. Thus a circular buffer.
*/
static void imuAddBiasValue(BiasObj* bias, Axis3i16* dVal)
{
bias->bufHead->x = dVal->x;
bias->bufHead->y = dVal->y;
bias->bufHead->z = dVal->z;
bias->bufHead++;
if (bias->bufHead >= &bias->buffer[IMU_NBR_OF_BIAS_SAMPLES])
{
bias->bufHead = bias->buffer;
bias->isBufferFilled = TRUE;
}
}
函数原型:
/**
* Checks if the variances is below the predefined thresholds.
* The bias value should have been added before calling this.
* @param bias The bias object
*/
static bool imuFindBiasValue(BiasObj* bias)
{
bool foundBias = FALSE;
if (bias->isBufferFilled)
{
Axis3i32 variance;
Axis3i32 mean;
imuCalculateVarianceAndMean(bias, &variance, &mean);
//uartSendData(sizeof(variance), (uint8_t*)&variance);
//uartSendData(sizeof(mean), (uint8_t*)&mean);
//uartPrintf("%i, %i, %i", variance.x, variance.y, variance.z);
//uartPrintf("%i, %i, %i\n", mean.x, mean.y, mean.z);
if (variance.x < GYRO_VARIANCE_THRESHOLD_X &&
variance.y < GYRO_VARIANCE_THRESHOLD_Y &&
variance.z < GYRO_VARIANCE_THRESHOLD_Z &&
(varianceSampleTime + GYRO_MIN_BIAS_TIMEOUT_MS < xTaskGetTickCount()))
{
varianceSampleTime = xTaskGetTickCount();
bias->bias.x = mean.x;
bias->bias.y = mean.y;
bias->bias.z = mean.z;
foundBias = TRUE;
bias->isBiasValueFound = TRUE;
}
}
return foundBias;
}
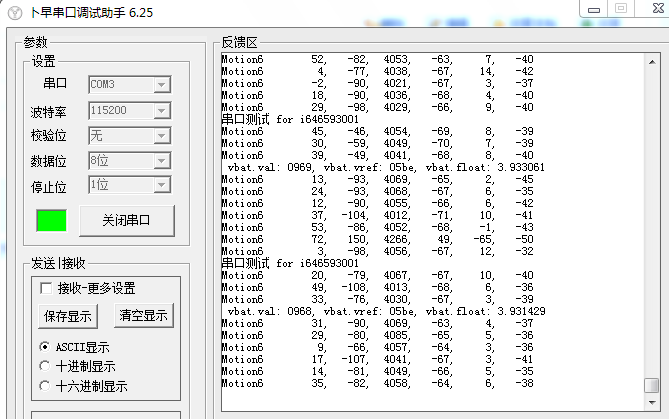
在填充完128个值后做如下处理:
imuCalculateVarianceAndMean(bias, &variance, &mean);
函数原型:
/**
* Calculates the variance and mean for the bias buffer.
*/
static void imuCalculateVarianceAndMean(BiasObj* bias, Axis3i32* varOut, Axis3i32* meanOut)
{
uint32_t i;
int32_t sum[GYRO_NBR_OF_AXES] = {0};
int64_t sumSq[GYRO_NBR_OF_AXES] = {0};
for (i = 0; i < IMU_NBR_OF_BIAS_SAMPLES; i++)
{
sum[0] += bias->buffer[i].x;
sum[1] += bias->buffer[i].y;
sum[2] += bias->buffer[i].z;
sumSq[0] += bias->buffer[i].x * bias->buffer[i].x;
sumSq[1] += bias->buffer[i].y * bias->buffer[i].y;
sumSq[2] += bias->buffer[i].z * bias->buffer[i].z;
}
varOut->x = (sumSq[0] - ((int64_t)sum[0] * sum[0]) / IMU_NBR_OF_BIAS_SAMPLES);
varOut->y = (sumSq[1] - ((int64_t)sum[1] * sum[1]) / IMU_NBR_OF_BIAS_SAMPLES);
varOut->z = (sumSq[2] - ((int64_t)sum[2] * sum[2]) / IMU_NBR_OF_BIAS_SAMPLES);
meanOut->x = sum[0] / IMU_NBR_OF_BIAS_SAMPLES;
meanOut->y = sum[1] / IMU_NBR_OF_BIAS_SAMPLES;
meanOut->z = sum[2] / IMU_NBR_OF_BIAS_SAMPLES;
isInit = TRUE;
}
可以看出varOut的每一项(x,y,z)为该项的方差
 。
。
meanOut为128个数的均值。
若计算出的3个方差小于设定值,且当前时间距上次采样时间小于1ms,则更新3个偏移值,并更新BiasObj的isBiasValueFound成员。
4、imuCalculateBiasMean(&accelBias, &mean);该函数Calculates the mean for the bias buffer.
5、 imuAccIIRLPFilter(&accelMpu, &accelLPF, &accelStoredFilterValues,
(int32_t)imuAccLpfAttFactor);
该函数上楼已经分析了,pass。
6、imuAccAlignToGravity(&accelLPF, &accelLPFAligned);
// Pre-calculated values for accelerometer alignment
float cosPitch;
float sinPitch;
float cosRoll;
float sinRoll;
/**
* Compensate for a miss-aligned accelerometer. It uses the trim
* data gathered from the UI and written in the config-block to
* rotate the accelerometer to be aligned with gravity.
*/
static void imuAccAlignToGravity(Axis3i16* in, Axis3i16* out)
{
Axis3i16 rx;
Axis3i16 ry;
// Rotate around x-axis
rx.x = in->x;
rx.y = in->y * cosRoll - in->z * sinRoll;
rx.z = in->y * sinRoll + in->z * cosRoll;
// Rotate around y-axis
ry.x = rx.x * cosPitch - rx.z * sinPitch;
ry.y = rx.y;
ry.z = -rx.x * sinPitch + rx.z * cosPitch;
out->x = ry.x;
out->y = ry.y;
out->z = ry.z;
}
7、最终结果
// Re-map outputs
gyroOut->x = (gyroMpu.x - gyroBias.bias.x) * IMU_DEG_PER_LSB_CFG;
gyroOut->y = (gyroMpu.y - gyroBias.bias.y) * IMU_DEG_PER_LSB_CFG;
gyroOut->z = (gyroMpu.z - gyroBias.bias.z) * IMU_DEG_PER_LSB_CFG;
accOut->x = (accelLPFAligned.x - accelBias.bias.x) * IMU_G_PER_LSB_CFG;
accOut->y = (accelLPFAligned.y - accelBias.bias.y) * IMU_G_PER_LSB_CFG;
accOut->z = (accelLPFAligned.z - accelBias.bias.z) * IMU_G_PER_LSB_CFG;
对陀螺仪的数据去偏差后赋值给gyroOut单位为度/s,对补偿后的加速度值赋值给accOut,单位为G。
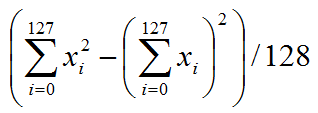
前面介绍了crazyflie的数据融合的处理方法,这里对mpu6050的数据按照这种方法处理,得到以下的运行结果。
刚启动时的结果:
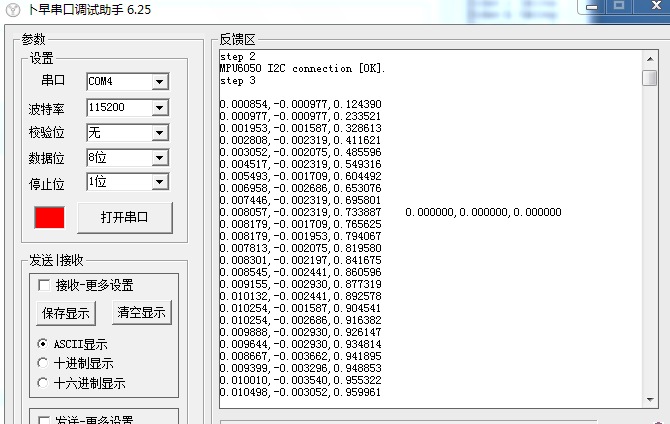
稳态建立后的结果为:
上面的数据为加速度的数据,单位为G。可以看到处理后的数据精度比较高,在千分之2左右,效果还是比较好的。
Mahony的算法的解读
------本文参考于http://www.eepw.com.cn/article/247809.htm
本帖目的是通过分析函数,学习四元数的算法,就是新闻里说的“消化吸收再创新”,主要是前两个,至于再创新那就不一定有这个本事了。
本文将分析一种常见的四轴飞行器姿态解算方法,Mahony的互补滤波法。此法简单有效,希望能给学习四轴飞行器的朋友们带来帮助。关于姿态解算和滤波的理论知识,推荐秦永元的两本书,一是《惯性导航》,目前已出到第二版了;二是《卡尔曼滤波与组合导航原理》。程序中的理论基础,可在书中寻找。
经常在算法中碰到IMU和AHRS这两个词,关于这两个词的具体含义与区别,这个地址有讨论:http://www.douban.com/note/75915865/,不懂得人可以稍微了解一下。不说别的,直奔主题。
下面开始进入正题:
先定义Kp,Ki,以及halfT 。
Kp,Ki,控制加速度计修正陀螺仪积分姿态的速度,halfT ,姿态解算时间的一半。此处解算姿态速度为500HZ,因此halfT 为0.001
#define Kp 2.0f
#define Ki 0.002f
#define halfT 0.001f
初始化四元数
float q0 = 1, q1 = 0, q2 = 0, q3 = 0;
定义姿态解算误差的积分
float exInt = 0, eyInt = 0, ezInt = 0;
以下为姿态解算函数。
参数gx,gy,gz分别对应三个轴的角速度,单位是弧度/秒;
参数ax,ay,az分别对应三个轴的加速度原始数据
由于加速度的噪声较大,此处应采用滤波后的数据
void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az)
{
float norm;
float vx, vy, vz;
float ex, ey, ez;
将加速度的原始数据,归一化,得到单位加速度
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
把四元数换算成“方向余弦矩阵”中的第三列的三个元素。根据余弦矩阵和欧拉角的定义,地理坐标系的重力向量,转到机体坐标系,正好是这三个元素。所以这里的vx、vy、vz,其实就是当前的机体坐标参照系上,换算出来的重力单位向量。(用表示机体姿态的四元数进行换算)
vx = 2*(q1*q3 - q0*q2);
vy = 2*(q0*q1 + q2*q3);
vz = q0*q0 - q1*q1 - q2*q2 + q3*q3;
这里说明一点,加速度计由于噪声比较大,而且在飞行过程中,受机体振动影响比陀螺仪明显,短时间内的可靠性不高。陀螺仪噪声小,但是由于积分是离散的,长时间的积分会出现漂移的情况,因此需要将用加速度计求得的姿态来矫正陀螺仪积分姿态的漂移。
在机体坐标参照系上,加速度计测出来的重力向量是ax、ay、az;陀螺积分后的姿态来推算出的重力向量是vx、vy、vz;它们之间的误差向量,就是陀螺积分后的姿态和加速度计测出来的姿态之间的误差。
向量间的误差,可以用向量积(也叫外积、叉乘)来表示,ex、ey、ez就是两个重力向量的叉积。这个叉积向量仍旧是位于机体坐标系上的,而陀螺积分误差也是在机体坐标系,而且叉积的大小与陀螺积分误差成正比,正好拿来纠正陀螺。由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对机体坐标系的纠正。
叉乘是数学基础,维基百科里有详细解释。
ex = (ay*vz - az*vy);
ey = (az*vx - ax*vz);
ez = (ax*vy - ay*vx);
将叉乘误差进行积分
exInt = exInt + ex*Ki;
eyInt = eyInt + ey*Ki;
ezInt = ezInt + ez*Ki;
用叉乘误差来做PI修正陀螺零偏,通过调节Kp,Ki两个参数,可以控制加速度计修正陀螺仪积分姿态的速度
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
四元数微分方程,没啥好说的了,看上面推荐的书吧,都是理论的东西,自个琢磨琢磨
实在琢磨不明白,那就把指定的参数传进这个函数,再得到相应的四元数,最后转化成欧拉角即可了。不过建议还是把理论弄清楚一点。
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
四元数单位化
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm;
q1 = q1 / norm;
q2 = q2 / norm;
q3 = q3 / norm;
}
姿态解算后,就得到了表示姿态的四元数。
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

