
目录
一、组装┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅1楼
二、直立┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅3楼
三、上级位调试┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅4楼
四、蓝牙控制┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅5楼
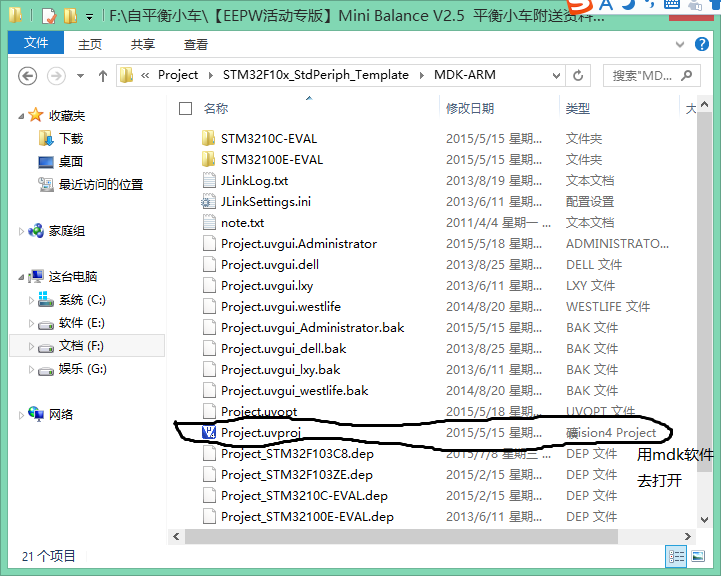
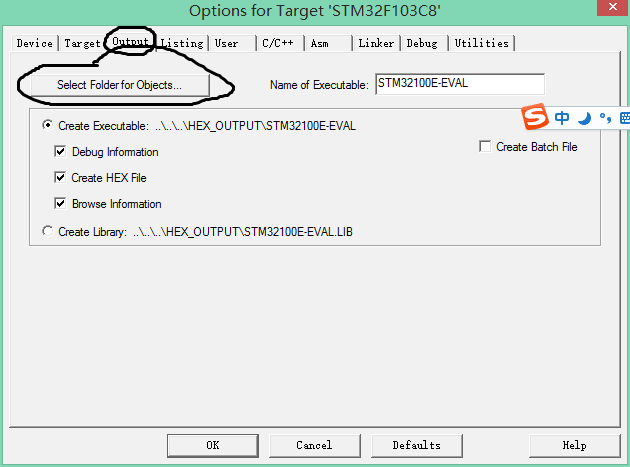
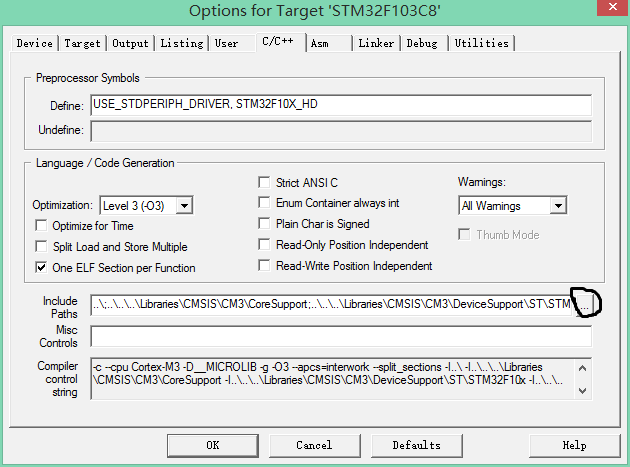
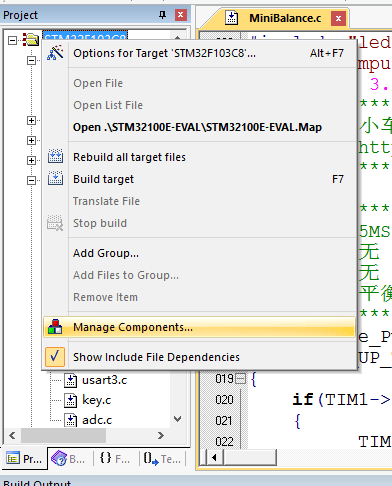
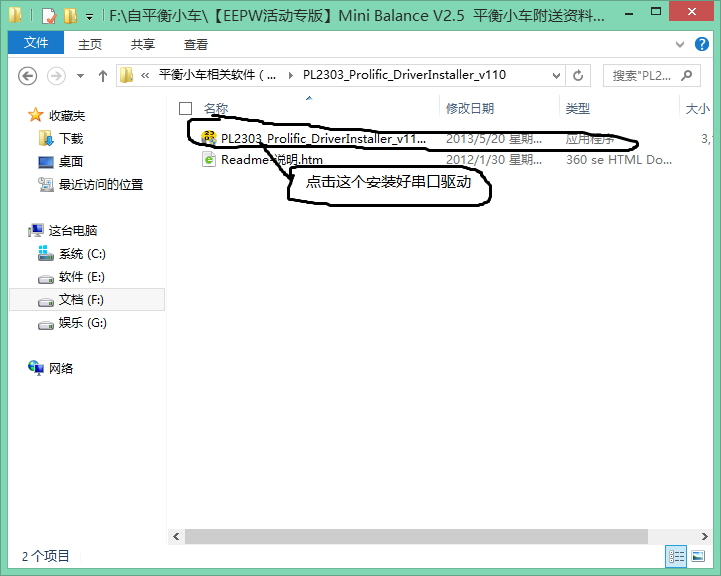
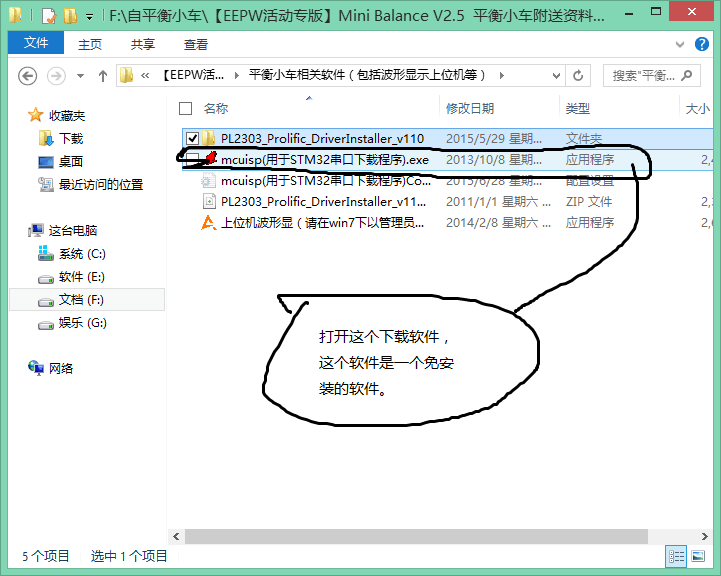
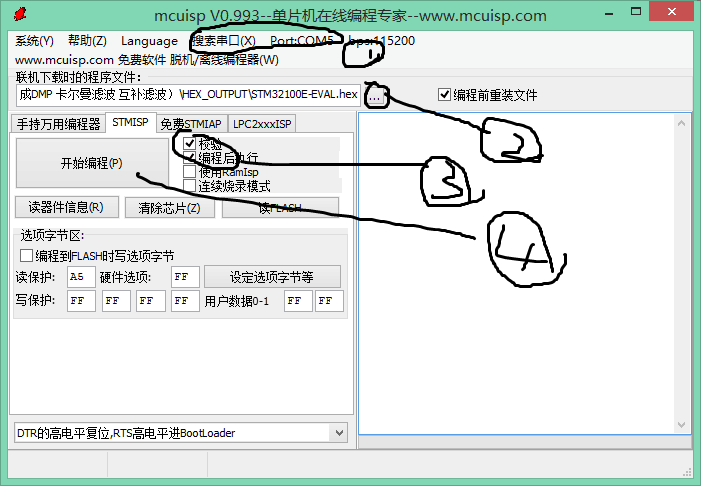
五、HXE文件的生成与下载------------------------------6楼
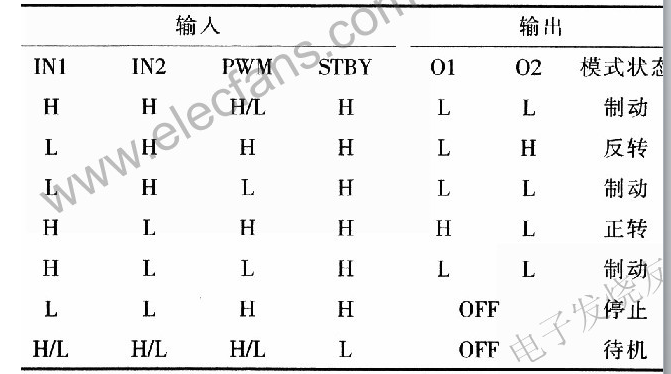
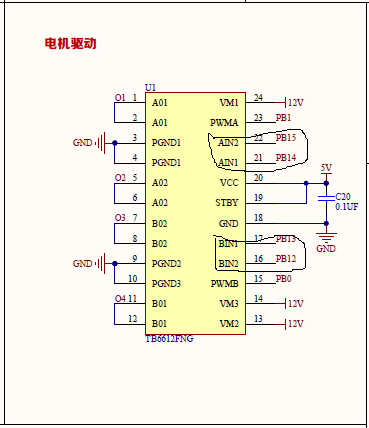
六、电机驱动实验------------------------------7楼
七、电机编码实验-----------------------------9楼
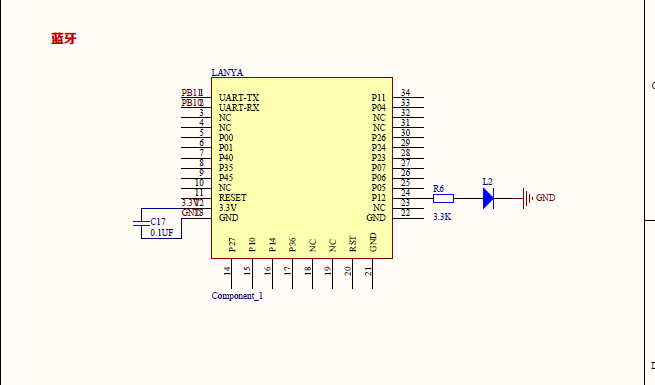
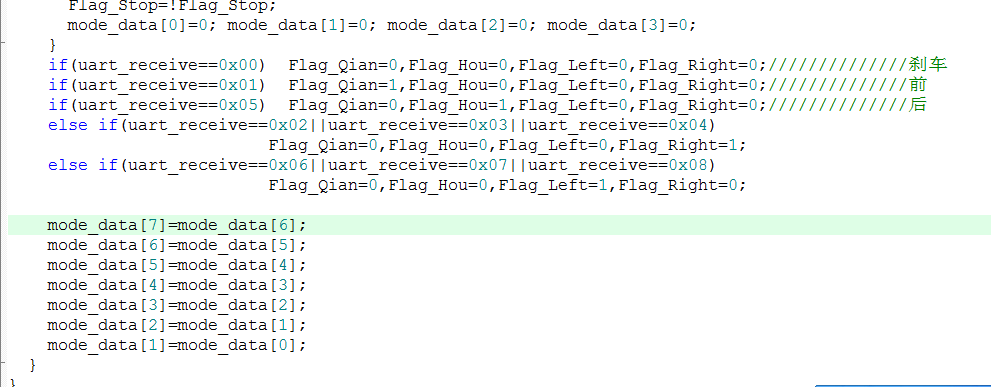
八、蓝牙控制实验------------------------------10楼
九、传感器的驱动实验--------------------11楼
十、PID调试----------------------------12楼
十一、小车直立静止---------------------13楼
一、开始组装
昨天收到货,今天才发贴。

这是所有的配件 。
照着这个说明书开始组装
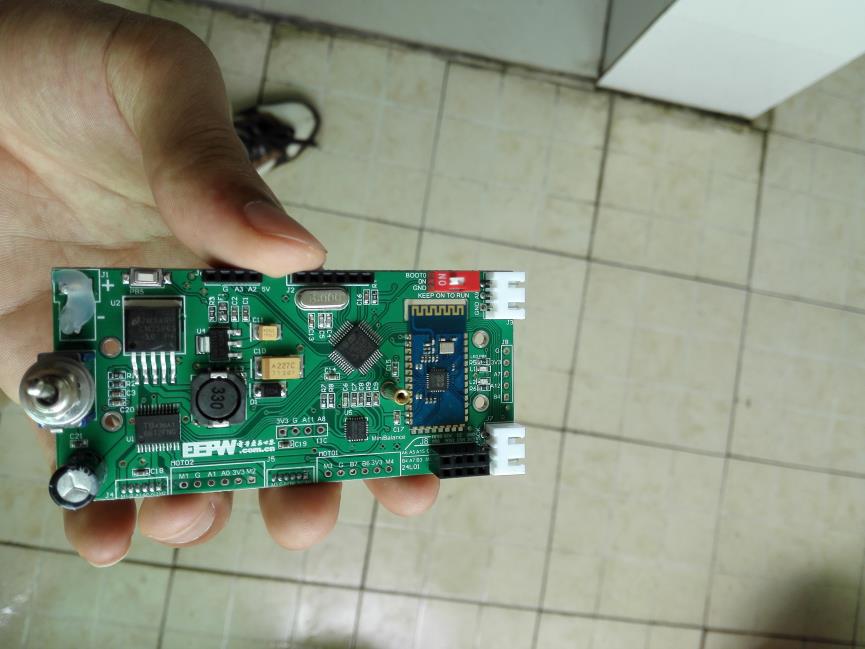
这是小车的主板。

这是小车的车轮,我的安装是从这里开始的。上面我已经安装上了四个铜柱是用来卡电池也是用来固定主板的。

上面已经提到电池了,这一步就是安装电池,由于电池是新的安装时有点难卡进去。不过没关系,我们慢慢地就可以把它卡进去。经过我们的努力把电池卡进去后我们不能停下,该装主板了。

把主板对准那四个铜柱,慢慢地把主板装上去。
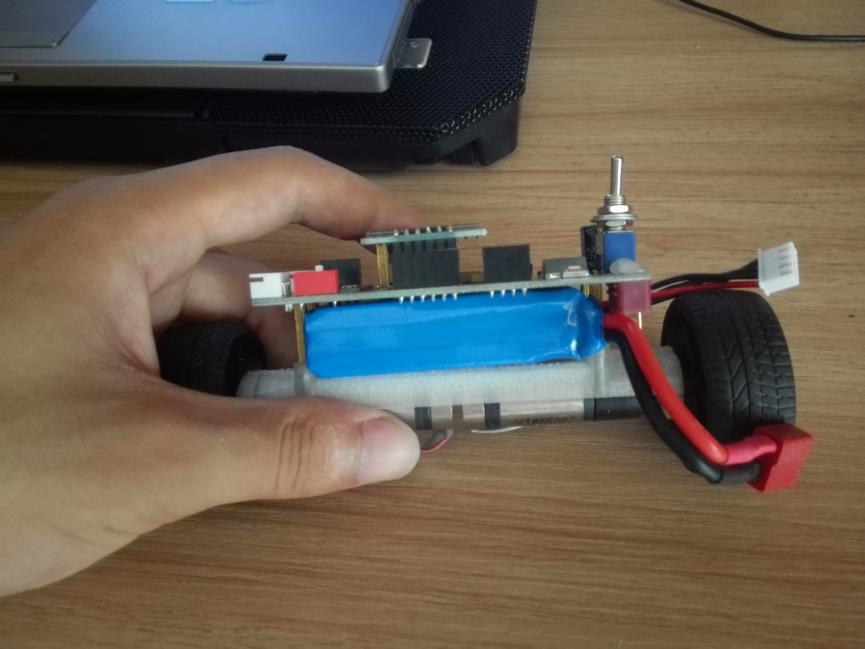
主板装好后我们要解决的是这个电池线的接口,由于这是新电池所以连上这个接口时也难免有点困难。

到这里我已经把电池接口和主板上的铜柱给接好了。
这是保护壳。
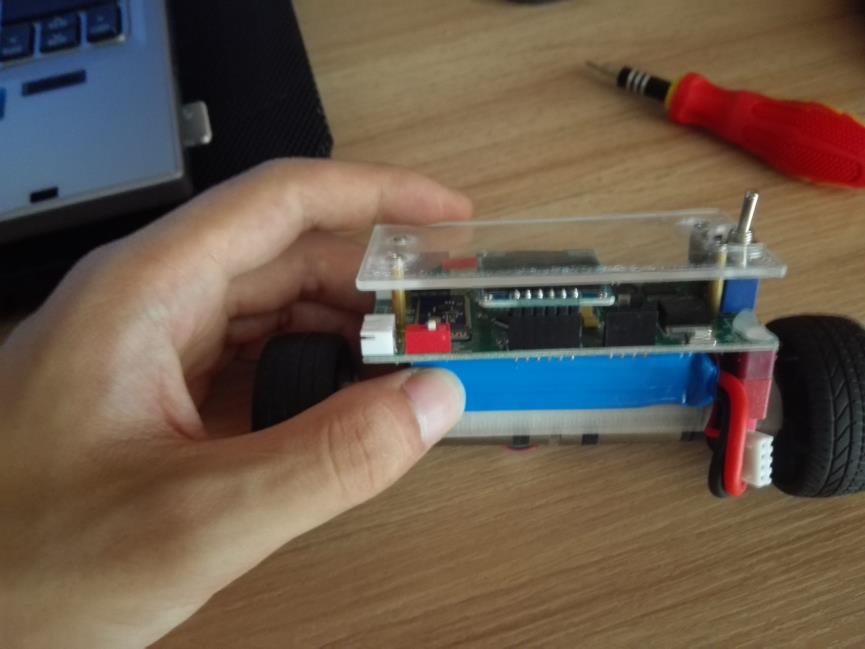
这是安装完成后的车,到这里小车已经安装完了。虽然到这里的整个过程需要的时间不要很多,但是,我是作为一个新手来发帖的,在这里看了许多的帖子慢慢地修改而成的。








 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

