
先回答标题问题:“对我自己而言,没有”。有时我自己会有这样的感受,Autosar的某些规范即使看了很多遍,工程上也碰到了些问题,但是每次再去读,发现:依然有些东西是不清晰的。本文就CanNM的网络状态机,再和大家抠几个细节,希望对你有用!
1、CanNmPnHandleMultipleNetworkRequests 作用
如果项目中,网络管理不用PN(Partial Network)功能,可能不太会关注CanNmPnHandleMultipleNetworkRequests。先看一下Autosar规范给出的解释:Specifies if CanNm performs an additional transition from Network Mode to Repeat Message State (true) or not (false).
也就是说,该参数使能与否决定着节点网络状态是否可以切换到RMS(Repeat Message State)。从哪种状态切换到RMS状态呢?
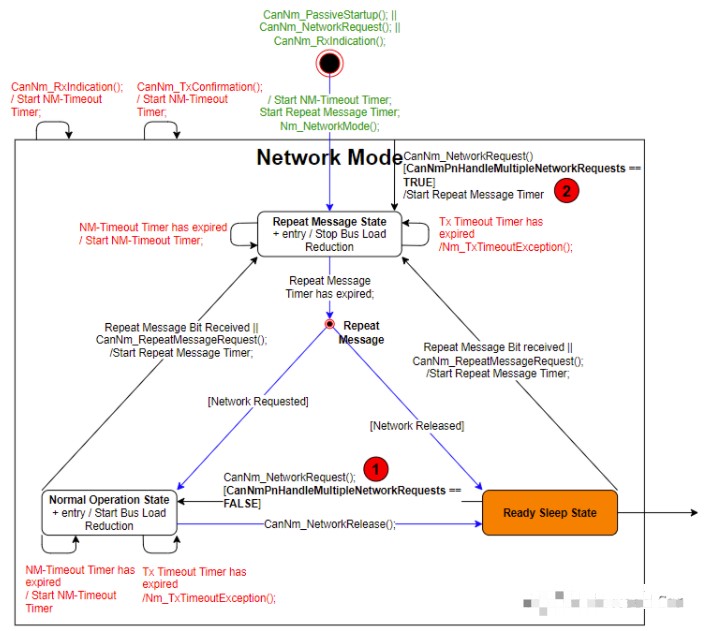
由上图可以看出,使用CanNmPnHandleMultipleNetworkRequests参数时,均与CanNm_NetworkRequest()接口的调用相关,主要有两个地方会判断该参数的使能情况。
位置 1
如果节点的网络状态在RSS(Ready Sleep State),调用CanNm_NetworkRequest()接口请求网络时,能否进入NOS(Normal Operation State)取决于CanNmPnHandleMultipleNetworkRequests的使能情况:
CanNmPnHandleMultipleNetworkRequests = FALSE,节点网络状态由RSS切换到NOS;
CanNmPnHandleMultipleNetworkRequests = TRUE,节点网络状态由RSS切换到RMS。
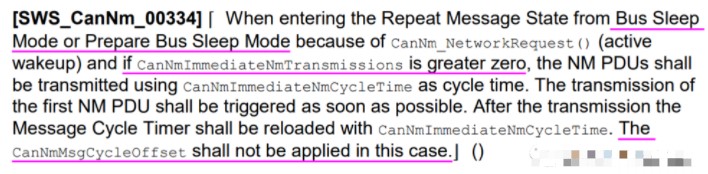
为什么CanNmPnHandleMultipleNetworkRequests = TRUE,网络状态需要切换到RMS状态呢?先看Autosar规范给的解释:
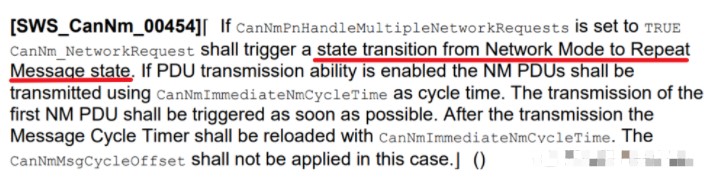
CanNmPnHandleMultipleNetworkRequests 的使能,我们需要先意识到一个前提:
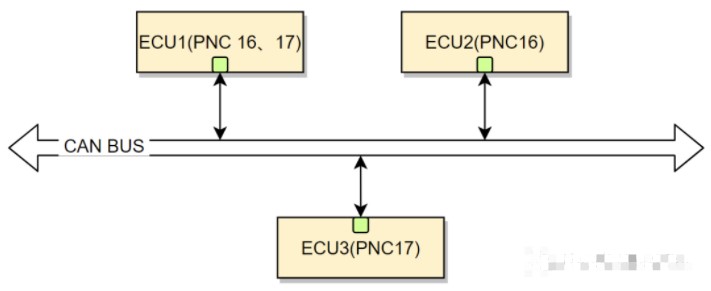
PN的使能,即:CanNmPnEnabled == true。使用PN功能,意味着每个节点会关联对应的PNC,只有接收到的PNC和节点相关,节点网络才能唤醒。如下图,假设某CAN BUS上有ECU1、ECU2、ECU3三个节点,ECU1关联PNC 16和PNC17,ECU2关联PNC 16,ECU3关联PNC 17。
假设:
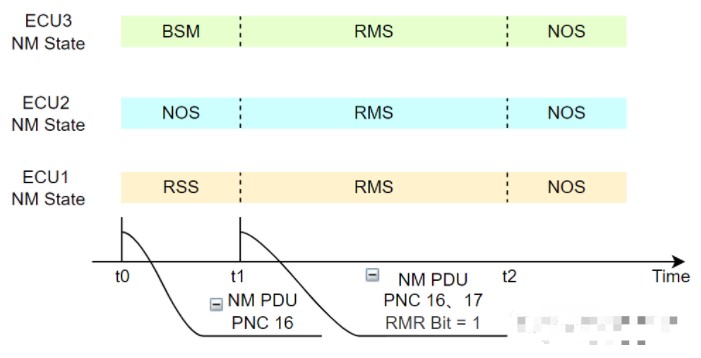
t0时刻,只有ECU1和ECU2在通信,即:NM Msg只包含PNC16,且ECU1进入RSS状态,ECU2在NOS状态,ECU3未有唤醒(处于BSM);
t1时刻,由于ECU1上层主动请求网络,ECU1需要唤醒ECU3参与通信,主动调用CanNm_NetworkRequest()接口请求网络(比如:对应的PNC17的VFC置位),同时发送的NM Msg中包含PNC 17。ECU3收到包含PNC17的NM Msg以后,网络状态由BSM进入RMS状态,为了保证三个节点在同一网络状态,因此,ECU1需要从RSS状态切换到RMS状态,同时,ECU1发送的NM Msg中,Repeat Message Request Bit = 1,将ECU2由NOS状态也拉回RMS状态,以此确保三个节点在相同的网络状态。不理解RMR Bit作用,可以参考前文勘误篇(一):Autosar网络管理:RepeatMessageRequestBit作用,你清楚吗?;
t2时刻,Repeat Message Timer超时,三者脱离RMS状态,ECU1、ECU2、ECU3进入NOS状态。上述过程如下所示:
位置 2
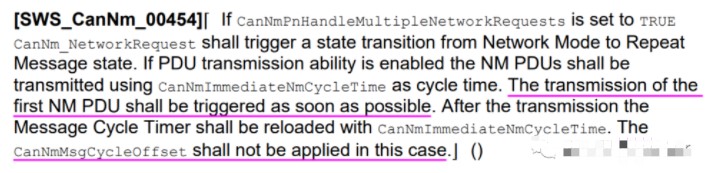
此处说明,只要在NM(Network Mode)模式下调用
CanNm_NetworkRequest()接口,且CanNmPnHandleMultipleNetworkRequests ==TRUE,网络状态需要切换到RMS状态,且重启Repeat Message Timer。分析同上,此处不再赘述。举例说明PNC请求与Channel NM Status关系:
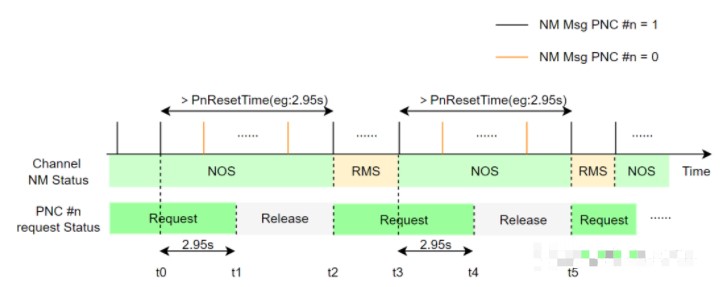
t0时刻,PNC #n保持请求(PNC #n = 1),假设PNC #n映射的Channel网络状态为NOS;
t1时刻,PnResetTime(2.95s)内收到PNC #n = 0(或者没有收到),PNC #n释放;
t2时刻,PNC#n再次请求,PNC #n映射的Channel网络状态由NOS进入RMS;
t3时刻,PNC#n保持请求,Channel由RMS进入NOS状态;
t4时刻,2.95s时间内没有PNC#n请求,PNC#n释放,Channel保持NOS状态;
t5时刻,PNC#n再次请求,同t2时刻。
2、网络启动,第一帧是否应该是网络管理报文?
从网络状态机可以看出,CanNm_PassiveStartup()、CanNm_RxIndication()、CanNm_NetworkRequest()接口的调用均可将节点网络状态切换到RMS。
CanNm_NetworkRequest():调用此接口,说明节点需要主动唤醒网络,如果此节点由BSM、PBSM模式进入RMS状态,
第一帧报文需要是网络管理报文,快速将网段内其他节点唤醒;
CanNm_PassiveStartup()、CanNm_RxIndication():调用这两个接口,个人理解:
第一帧报文没有必要是网络管理报文,因为总线上已经有网络管理报文在发送,说明有主动网络节点发送了网络管理报文,承担着快速唤醒网络的“重任”,所以接收节点无需保证第一帧报文是网络管理报文,接收节点需要做的是把应用报文快速发出,保证功能的快速使能。
3、CanNmMsgCycleOffset的使用场景
网络唤醒时,各主动网络节点均发送各自的NM Msg,会增加总线负载,为了降低网络唤醒时的总线负载,会为每个主动网络节点设置一个Offset值,比如:CanNmMsgCycleOffset。CanNmMsgCycleOffset的使能需要注意:使能快发模式时,CanNmMsgCycleOffset不适用,需要注意的其他条件,Autosar也给出了其他解释,如下所示:
CASE 1:
CASE 2:
注意:
C
anNmMsgCycleOffset是发出第一帧网络管理报文时的偏移值,即满足NM Msg发送时,第一次发送NM Msg时的偏移。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

