
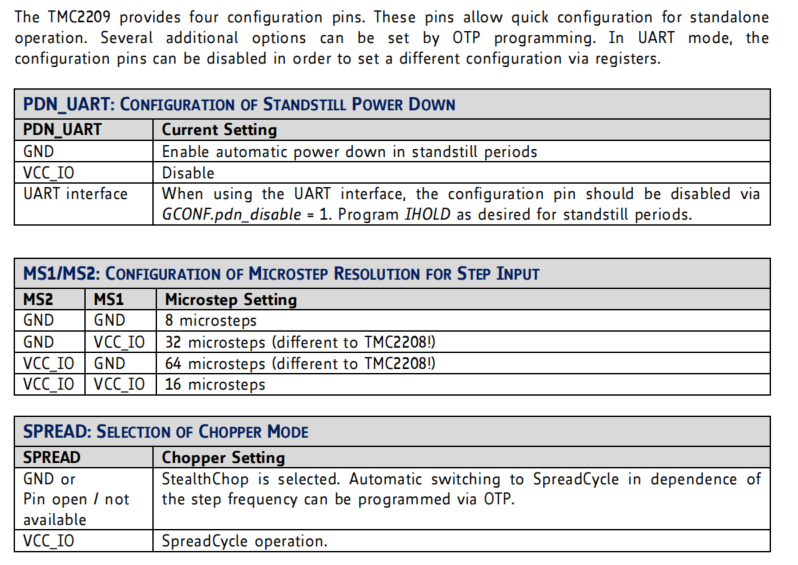
1、Step/Dir独立模式引脚配置

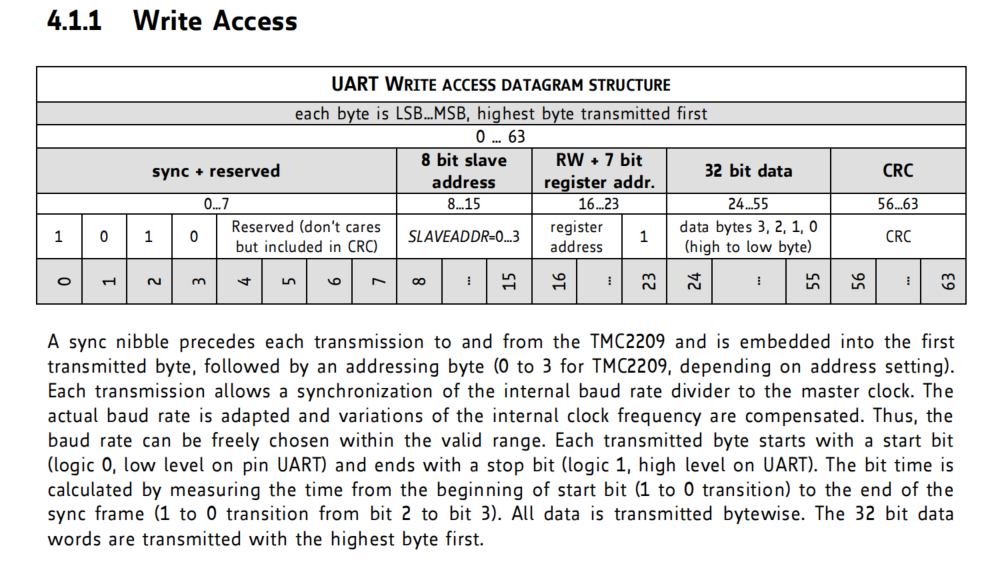
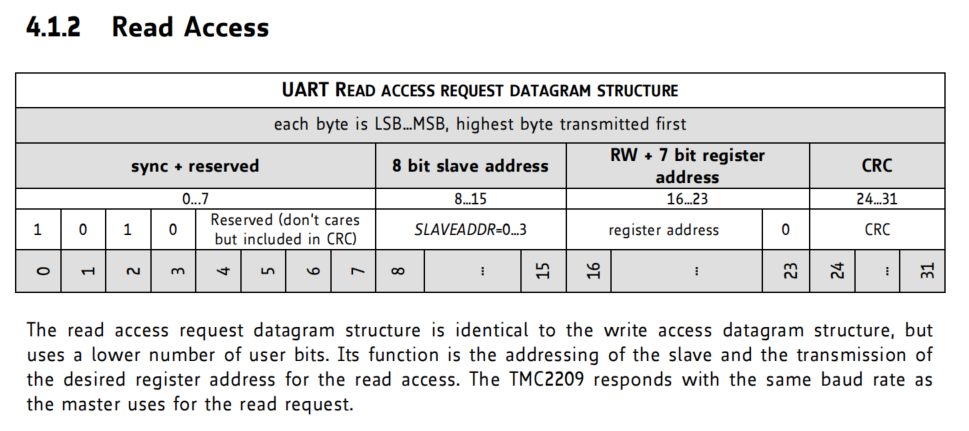
2、串口发送和接受数据格式
 UART发送指令采用的CRC_8校验码:
UART发送指令采用的CRC_8校验码:
static void prvTMCCal_CRC8(uint8_t *pucData, uint8_t ucDataLength)
{
int i,j;
unsigned char *crc = pucData + (ucDataLength - 1);
unsigned char currentByte;
*crc = 0;
for(i = 0; i < (ucDataLength - 1);i++)
{
currentByte = pucData[i];
for(j = 0; j < 8; j++)
{
if((*crc >> 7) ^ (currentByte & 0x01)){
*crc = (*crc << 1) ^ 0x07;
}else{
*crc = (*crc << 1);
}
currentByte = currentByte >>1;
}
}
}
3、使用StallGuard技术无传感器回原点1、UART连接时,ENN必须为电平并且MS1、MS2必须悬空;2、 配置内部采样电阻。具体在GCONF中internal_Rsens = 1;3、电机电流设置,配置IHOLD_RUN寄存器;4、设置失速电流阈值TCOOLTHRS;5、 设置灵敏度SGTHRS。6、调节电机的实际运动电流需要看CONFIG寄存器的第一位,若选择外部电流需要Vref参与。欢迎大家一起交流,133-6006-2521
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

