
求大神指点,目前只调发送,基本配置和发送函数如下。
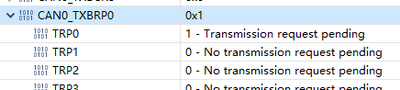
调用发送函数后,CAN0_TXBRP0寄存器的TRP0一直是1,数据始终未发出。
IFX_CONST IfxCan_Can_Pins can_pins[CAN_NUM] = {
{ IfxCan_TXD00_P20_8_OUT, IfxPort_OutputMode_pushPull, // Tx pin
IfxCan_RXD00B_P20_7_IN, IfxPort_InputMode_pullUp, // Rx pin
IfxPort_PadDriver_cmosAutomotiveSpeed4},
......
};
void can_init(int index) {
// create module configuration
IfxCan_Can_Config canConfig;
IfxCan_Can can;
IfxCan_NodeId can_node_num = 0;
IfxCan_Can_initModuleConfig( canConfig, MODULE_CAN0);
// initialize module
IfxCan_Can_initModule( can, canConfig);
can_node_num = index % 4;
// create node configuration
{
IfxCan_Can_initNodeConfig( g_drv_can[index].can_node_config, can);
// initialize Node 0 g_drv_can[index].can_node_config.nodeId = can_node_num;
g_drv_can[index].can_node_config.clockSource = IfxCan_ClockSource_both;
g_drv_can[index].can_node_config.frame.type = IfxCan_FrameType_transmitAndReceive;
g_drv_can[index].can_node_config.frame.mode = IfxCan_FrameMode_fdLong;
g_drv_can[index].can_node_config.txConfig.dedicatedTxBuffersNumber = 31;
g_drv_can[index].can_node_config.txConfig.txMode = IfxCan_TxMode_dedicatedBuffers;
g_drv_can[index].can_node_config.txConfig.txBufferDataFieldSize = IfxCan_DataFieldSize_8;
g_drv_can[index].can_node_config.messageRAM.txBuffersStartAddress = 0x400;
g_drv_can[index].can_node_config.messageRAM.baseAddress = MODULE_CAN0_RAM + NODE0_RAM_OFFSET;
g_drv_can[index].can_node_config.baudRate.baudrate = 500000;
g_drv_can[index].can_node_config.pins = can_pins[index];
g_drv_can[index].can_node_config.busLoopbackEnabled = FALSE;
g_drv_can[index].can_node_config.calculateBitTimingValues = TRUE;
// initialize Node 0
IfxCan_Can_initNode( g_drv_can[index].can_node, g_drv_can[index].can_node_config);
}
}
void can_send(int index)
{
IfxCan_Can_initMessage( g_drv_can[index].tx_msg);
// change the relevent members of message structure
g_drv_can[index].tx_msg.bufferNumber = 0;
g_drv_can[index].tx_msg.dataLengthCode = IfxCan_DataLengthCode_8;
g_drv_can[index].tx_msg.frameMode = IfxCan_FrameMode_fdLong;
g_drv_can[index].tx_msg.messageIdLength = IfxCan_MessageIdLength_standard;
g_drv_can[index].tx_msg.messageId = CAN_MESSAGE_ID;
g_drv_can[index].txdata[0] = 0x78563412;
g_drv_can[index].txdata[1] = 0xf0debc9a;
// Transmit Data
IfxCan_Can_sendMessage( g_drv_can[index].can_node, g_drv_can[index].tx_msg, g_drv_can[index].txdata);
}
共2条
1/1 1 跳转至页
TC397CAN0TXBRP0寄存器的TRP0一直是1,数据始终未发出的原因?
关键词: TC397 CAN TXBRP0
2楼
1. 检查CAN模块的初始化配置:确保您的CAN模块已经正确初始化,包括波特率、时钟、过滤器等设置。如果这些设置不正确,可能会导致数据无法发送。
2. 检查CAN模块的发送函数:确保您的发送函数正确地将数据写入到CAN模块的发送缓冲区。如果发送函数有错误,可能会导致数据无法发送。
3. 检查CAN模块的中断配置:如果您的CAN模块使用了中断来处理发送完成,确保中断已经正确配置,并且中断服务函数能够正确处理发送完成的事件。
4. 检查CAN模块的发送状态:在发送数据之前,确保CAN模块的发送状态是空闲的,没有其他发送任务正在进行。如果CAN模块正在发送其他数据,可能会导致新的发送任务无法开始。
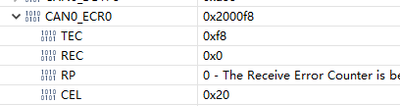
5. 检查CAN模块的错误状态:检查CAN模块的错误计数器和错误状态,确保没有错误发生。如果CAN模块发生了错误,可能会导致数据无法发送。
6. 检查CAN总线上的其他节点:如果CAN总线上的其他节点没有正确响应,可能会导致数据无法发送。检查其他节点的配置和通信状态,确保它们能够正确接收和响应数据。
7. 使用调试工具:如果以上步骤都无法解决问题,可以尝试使用调试工具(如逻辑分析仪)来观察CAN总线上的通信情况,以便找到问题的根本原因。
共2条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
| 谨防极海G32M3101电机评估板易跌落的陷阱被打赏¥24元 | |
| 【全网首拆】M5STACK ATOM系列开发板拆解 / AtomS3R-CAM摄像头更换方法(提高10倍像素)被打赏¥26元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

