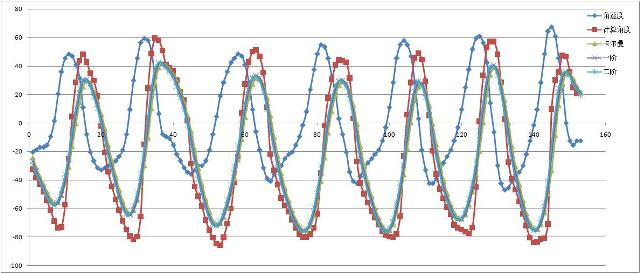
昨天换了一个MZ48,回去测试了一下,编码器OK了,采回来的数据比较稳定,应该能保证0.05°,主要由于自己做的车架固定的传感器安装精度不太高;
下面是采的数据:

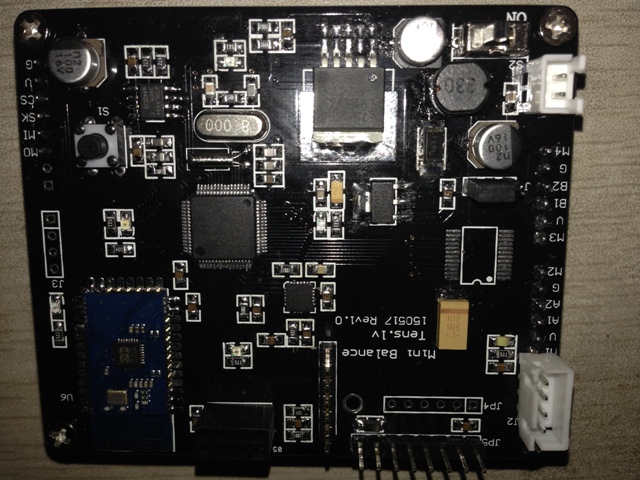
板子上设计了四个灯,全闪是待机,点一下按键全灭进入平衡状态,单个等常亮是表示方向,两个灯亮是原地转圈

下面插一下主要代码:
主程序-测试版
s16 Gyro_x,Gyro_y,Gyro_z;
u8 i;
u16 Voltage = 0;
Init_All(); //³õʼ»¯ËùÓÐÓ²¼þ
while(1)
{
Voltage = 0.4032 * Get_Adc(); //µç³Øµçѹ£¨µ¥Î»0.01V£©
SPI1_CS = 0;
for(i=0;i<SPI_Mz48;i++)
{
Mz48[i] = (SPI1_ReadWriteByte(0xFFFF) & 0x3FFF);
delay_us(1);
}
SPI1_CS = 1;
printf("\n MZ48_1Êý¾Ý£º%d MZ48_2Êý¾Ý£º%d µç³Øµçѹ£º%d \n",Mz48[0],Mz48[1],Voltage); // Ïò´®¿Ú´òÓ¡
// /*
// Gyro_x=getGyroX(); //XÖáÊý¾Ý
// Gyro_y=getGyroY(); //YÖáÊý¾Ý
// Gyro_z=getGyroZ(); //ZÖáÊý¾Ý
// */
// Gyro_x=getAccX(); //XÖáÊý¾Ý
// Gyro_y=getAccY(); //YÖáÊý¾Ý
// Gyro_z=getAccZ(); //ZÖáÊý¾Ý
//// printf("\n xÖáÊý¾Ý£º%d yÖáÊý¾Ý£º%d zÖáÊý¾Ý£º%d \n",Gyro_x,Gyro_y,Gyro_z); // Ïò´®¿Ú´òÓ¡
KEY_Scan();
if(Mini_Balance)
{
LED1 = 1;
LED2 = 1;
LED3 = 1;
LED4 = 1;
}
else
{
LED1 = ~LED1;
LED2 = ~LED2;
LED3 = ~LED3;
LED4 = ~LED4;
}
delay_ms(500); //ÉÔ×÷ÑÓʱ
}
SPI初始化:
//SPI1¿Ú³õʼ»¯,·ÃÎÊMZ48
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO | RCC_APB2Periph_SPI1, ENABLE );
/* Configure SPI1 pins: SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure I/O for MZ48 Chip select */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //SPI1_CS
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);
/* SPI1 configuration */
SPI_Cmd(SPI1, DISABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //ÉèÖÃSPIµ¥Ïò»òÕßË«ÏòµÄÊý¾Ýģʽ:SPIÉèÖÃΪ˫ÏßË«ÏòÈ«Ë«¹¤
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //ÉèÖÃSPI¹¤×÷ģʽ:ÉèÖÃΪÖ÷SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b; //ÉèÖÃSPIµÄÊý¾Ý´óС:SPI·¢ËͽÓÊÕ16λ֡½á¹¹
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //Ñ¡ÔñÁË´®ÐÐʱÖÓµÄÎÈ̬:ʱÖÓÐü¿ÕµÍ
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //Êý¾Ý²¶»ñÓÚµÚ¶þ¸öʱÖÓÑØ£¿£¿£¿£¨SPI_CPHA_1Edge£©
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSSÐźÅÓÉÓ²¼þ£¨NSS¹Ü½Å£©»¹ÊÇÈí¼þ£¨Ê¹ÓÃSSI룩¹ÜÀí:ÄÚ²¿NSSÐźÅÓÐSSIλ¿ØÖÆ
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //¶¨Ò岨ÌØÂÊÔ¤·ÖƵµÄÖµ:²¨ÌØÂÊÔ¤·ÖƵֵΪ2¼´@72MHzʱΪ36M
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //Ö¸¶¨Êý¾Ý´«Êä´ÓMSBλ»¹ÊÇLSBλ¿ªÊ¼:Êý¾Ý´«Êä´ÓMSBλ¿ªÊ¼
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRCÖµ¼ÆËãµÄ¶àÏîʽ
SPI_Init(SPI1, &SPI_InitStructure); //¸ù¾ÝSPI_InitStructÖÐÖ¸¶¨µÄ²ÎÊý³õʼ»¯ÍâÉèSPIx¼Ä´æÆ÷
/* Enable SPI1 */
SPI_Cmd(SPI1, ENABLE); //ʹÄÜSPIÍâÉè
搜索
复制











 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

