
流程满清楚的,,,先学习看下,,如果改成小船应该更加可爱
#include <CurieIMU.h>
int ax, ay, az;
int gx, gy, gz;
#define LED_PIN 13
void setup() {
CurieIMU.begin();
Serial.begin(9600);
Serial.print("Starting Gyroscope calibration...");
CurieIMU.autoCalibrateGyroOffset();
Serial.println(" Done");
Serial.print("Starting Acceleration calibration...");
CurieIMU.autoCalibrateAccelerometerOffset(X_AXIS, 0);
CurieIMU.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
CurieIMU.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
Serial.println(" Done");
Serial.println("Internal sensor offsets AFTER calibration...");
Serial.print(CurieIMU.getAccelerometerOffset(X_AXIS)); Serial.print("\t");
Serial.print(CurieIMU.getAccelerometerOffset(Y_AXIS)); Serial.print("\t");
Serial.print(CurieIMU.getAccelerometerOffset(Z_AXIS)); Serial.print("\t");
Serial.print(CurieIMU.getAccelerometerOffset(X_AXIS)); Serial.print("\t");
Serial.print(CurieIMU.getAccelerometerOffset(Y_AXIS)); Serial.print("\t");
Serial.print(CurieIMU.getAccelerometerOffset(Z_AXIS)); Serial.print("\t");
Serial.println("");
}
double total_angle=0;
/* 通过卡尔曼滤波得到的最终角度 */
float Angle=0.0;
/*由角速度计算的倾斜角度 */
float Angle_gy=0.0;
float Q_angle=0.9;
float Q_gyro=0.001;
float R_angle=0.5;
float dt=0.01; /* dt为kalman滤波器采样时间; */
char C_0 = 1;
float Q_bias, Angle_err;
float PCt_0=0.0, PCt_1=0.0, E=0.0;
float K_0=0.0, K_1=0.0, t_0=0.0, t_1=0.0;
float Pdot[4] ={0,0,0,0};
float PP[2][2] = { { 1, 0 },{ 0, 1 } };
/* 卡尔曼滤波函数,具体实现可以参考网上资料,也可以使用其它滤波算法 */
void Kalman_Filter(float Accel,float Gyro)
{
Angle+=(Gyro - Q_bias) * dt;
Pdot[0]=Q_angle - PP[0][1] - PP[1][0];
Pdot[1]=- PP[1][1];
Pdot[2]=- PP[1][1];
Pdot[3]=Q_gyro;
PP[0][0] += Pdot[0] * dt;
PP[0][1] += Pdot[1] * dt;
PP[1][0] += Pdot[2] * dt;
PP[1][1] += Pdot[3] * dt;
Angle_err = Accel - Angle;
PCt_0 = C_0 * PP[0][0];
PCt_1 = C_0 * PP[1][0];
E = R_angle + C_0 * PCt_0;
if(E!=0)
{
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
}
t_0 = PCt_0;
t_1 = C_0 * PP[0][1];
PP[0][0] -= K_0 * t_0;
PP[0][1] -= K_0 * t_1;
PP[1][0] -= K_1 * t_0;
PP[1][1] -= K_1 * t_1;
Angle += K_0 * Angle_err;
Q_bias += K_1 * Angle_err;
}
void loop() {
// read raw accel/gyro measurements from device
double ax_angle=0.0;
double gx_angle=0.0;
unsigned long time=0;
unsigned long mictime=0;
static unsigned long pretime=0;
float gyro=0.0;
if(pretime==0)
{
pretime=millis();
return;
}
mictime=millis();
CurieIMU.readMotionSensor(ay, ax, az, gy, gx, gz);
/* 加速度量程范围设置2g 16384 LSB/g
* 计算公式:
* 前边已经推导过这里再列出来一次
* x是小车倾斜的角度,y是加速度计读出的值
* sinx = 0.92*3.14*x/180 = y/16384
* x=180*y/(0.92*3.14*16384)=
*/
//ax -= AX_ZERO;
ax_angle=ax/262;
/* 陀螺仪量程范围设置250 131 LSB//s
* 陀螺仪角度计算公式:
* 小车倾斜角度是gx_angle,陀螺仪读数是y,时间是dt
* gx_angle +=(y/(131*1000))*dt
*/
//gy -= GX_ZERO;
time=mictime-pretime;
gyro=gy/131.0;
gx_angle=gyro*time;
gx_angle=gx_angle/1000.0;
total_angle-=gx_angle;
dt=time/1000.0;
Kalman_Filter(ax_angle,gyro);
Serial.print(ax_angle); Serial.print(",");
Serial.print(total_angle); Serial.print(",");
Serial.println(Angle);
pretime=mictime;
}
把MPU6050的卡尔曼滤波程序,改成了用Arduino/Genuion 101的Curie IMU
看了一下串口数据
滤波后的数据果然要好了好多


被网上各种资料整的头大
重新学习了一下角度的关系
原来我当初没有好好学习,神马几何、三角函数都还给老师了
还好,有万能的互联网,我们可以充分发挥拿来主义精神
首先,我的IMU的安装方向:(Z轴朝下,我找不到图)
很遗憾,很多人都是把X方向朝前,所以如果没搞明白方向,拿人家代码是无法使用的
(即使搞明白也没法用,我的大破车,据说太大了,555)
然后,几个角度的问题:
经常看到,pitch yaw roll,听起来挺高大上的,但是也不知道是啥,继续哭
找到一篇文章:
http://www.123kuai.com/index.php?a=show&c=index&catid=9&id=54
说的太好了, 复制到下边了。
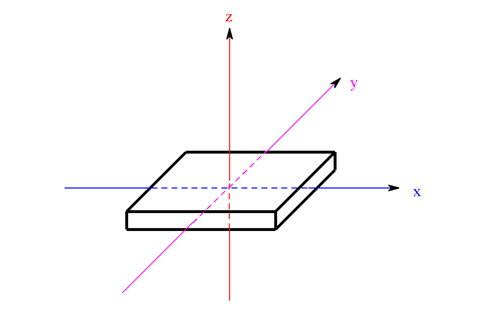
先把坐标复制上来


根据下文的坐标系以及说明,总结如下:
roll, 绕X轴转角
pitch, 绕Y轴转角
yaw, 绕Z轴转角
以上角度遵循右手定则
结合到我的小车IMU里,roll是我们要的角度
按右手定则,前倾为负,后仰为整
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
要了解飞机姿态,需要首先知道什么是地面坐标系和机体坐标系。
■地面坐标系(earth-surface inertial reference frame)Sg--------Oxgygzg

①在地面上选一点Og
②使xg轴在水平面内并指向某一方向
③zg轴垂直于地面并指向地心
④yg轴在水平面内垂直于xg轴,其指向按右手定则确定
■机体坐标系(Aircraft-body coordinate frame)Sb-------oxyz
①原点O取在飞机质心处,坐标系与飞机固连
②x轴在飞机对称平面内并平行于飞机的设计轴线指向机头
③y轴垂直于飞机对称平面指向机身右方
④z轴在飞机对称平面内,与x轴垂直并指向机身下方
■欧拉角/姿态角(Euler Angle)


机体坐标系与地面坐标系的关系是三个Euler角,反应了飞机相对地面的姿态。
俯仰角θ(pitch):机体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。

偏航角ψ(yaw):
机体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,反之为负。

滚转角Φ(roll):机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,反之为负。

回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
| 谨防极海G32M3101电机评估板易跌落的陷阱被打赏¥24元 | |
| 【全网首拆】M5STACK ATOM系列开发板拆解 / AtomS3R-CAM摄像头更换方法(提高10倍像素)被打赏¥26元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

